title: classifier_guidance
由于基于 diffusion 的图像生成模型多样性过高(不可控,而且容易出现很多真实性很差的图片,FID 指标太高),可能的一种解决办法就是 conditional generation,即将 $$p(x)\rightarrow p(x|y)$$,让一个 DDPM 变为一个 conditional DDPM。
条件生成模型是只指在条件 y \boldsymbol y y x \boldsymbol x x p ( x ∣ y ) p(\boldsymbol x|\boldsymbol y) p ( x ∣ y )
注意我们对 guidance 的要求是:
不影响训练过程,即我们只在采样过程做文章
尝试用一种高效的方法进行指导采样,而不是最后接一个简单的分类器,让模型生成很多图片最终选一个最好的图片
我们用 q ^ \hat{q} q ^ y \boldsymbol y y q ( x t − 1 ∣ x t ) q(\boldsymbol x_{t-1}|\boldsymbol x_t) q ( x t − 1 ∣ x t ) q ^ ( x t − 1 ∣ x t , y ) \hat{q}(\boldsymbol x_{t-1}|\boldsymbol x_t, \boldsymbol y) q ^ ( x t − 1 ∣ x t , y ) y \boldsymbol y y
q ^ ( x t − 1 ∣ x t , y ) = q ^ ( x t − 1 ∣ x t ) q ^ ( y ∣ x t − 1 , x t ) q ^ ( y ∣ x t ) \hat{q}(\boldsymbol x_{t-1}|\boldsymbol x_t, \boldsymbol y) = \frac{\hat{q}(\boldsymbol x_{t-1}|\boldsymbol x_t)\hat{q} (\boldsymbol y| \boldsymbol x_{t-1}, \boldsymbol x_t)}{\hat{q}(\boldsymbol y|\boldsymbol x_t)}
q ^ ( x t − 1 ∣ x t , y ) = q ^ ( y ∣ x t ) q ^ ( x t − 1 ∣ x t ) q ^ ( y ∣ x t − 1 , x t )
这个公式的右边包含三个概率项:
q ^ ( x t − 1 ∣ x t ) \hat{q}(\boldsymbol x_{t-1}|\boldsymbol x_t) q ^ ( x t − 1 ∣ x t ) x t \boldsymbol x_t x t x t − 1 \boldsymbol x_{t-1} x t − 1 q ( x t − 1 ∣ x t ) q(\boldsymbol x_{t-1}|\boldsymbol x_t) q ( x t − 1 ∣ x t ) q ^ ( y ∣ x t − 1 , x t ) \hat{q} (\boldsymbol y| \boldsymbol x_{t-1}, \boldsymbol x_t) q ^ ( y ∣ x t − 1 , x t ) x t \boldsymbol x_t x t x t − 1 \boldsymbol x_{t-1} x t − 1 y \boldsymbol y y q ^ ( y ∣ x t ) \hat{q}(\boldsymbol y|\boldsymbol x_t) q ^ ( y ∣ x t )
看上去这些新的 q ^ \hat{q} q ^
条件化的前向过程不变: q ^ ( x t ∣ x t − 1 , y ) = q ( x t ∣ x t − 1 ) \hat{q}(\boldsymbol x_{t}|\boldsymbol x_{t-1}, \boldsymbol y) = q(\boldsymbol x_{t}|\boldsymbol x_{t-1}) q ^ ( x t ∣ x t − 1 , y ) = q ( x t ∣ x t − 1 ) x t − 1 \boldsymbol x_{t-1} x t − 1 x t \boldsymbol x_t x t y \boldsymbol y y
初始分布不变: q ^ ( x 0 ) = q ( x 0 ) \hat{q}(\boldsymbol x_0) = q(\boldsymbol x_0) q ^ ( x 0 ) = q ( x 0 )
Markov property:整个条件化的前向轨迹满足: q ^ ( x 1 : T ∣ x 0 , y ) = ∏ t = 1 T q ^ ( x t ∣ x t − 1 , y ) = ∏ t = 1 T q ( x t ∣ x t − 1 ) = q ( x 1 : T ∣ x 0 ) \hat{q}(\boldsymbol x_{1:T}|\boldsymbol x_0, \boldsymbol y) = \prod_{t=1}^T \hat{q}(\boldsymbol x_t|\boldsymbol x_{t-1}, \boldsymbol y) = \prod_{t=1}^T q(\boldsymbol x_t|\boldsymbol x_{t-1}) = q(\boldsymbol x_{1:T}|\boldsymbol x_0) q ^ ( x 1 : T ∣ x 0 , y ) = ∏ t = 1 T q ^ ( x t ∣ x t − 1 , y ) = ∏ t = 1 T q ( x t ∣ x t − 1 ) = q ( x 1 : T ∣ x 0 )
接下来,我们基于这些假设推导上面三个概率的具体形式
q ^ ( x t ∣ x t − 1 ) \hat{q}(\boldsymbol x_t|\boldsymbol x_{t-1}) q ^ ( x t ∣ x t − 1 ) 这一步的目标是证明,即使我们考虑了条件 y \boldsymbol y y y \boldsymbol y y x t − 1 \boldsymbol x_{t-1} x t − 1 x t \boldsymbol x_t x t q ( x t ∣ x t − 1 ) q(\boldsymbol x_t|\boldsymbol x_{t-1}) q ( x t ∣ x t − 1 )
q ^ ( x t ∣ x t − 1 ) = ∫ y q ^ ( x t , y ∣ x t − 1 ) d y = ∫ y q ^ ( x t ∣ x t − 1 , y ) q ^ ( y ∣ x t − 1 ) d y = ∫ y q ( x t ∣ x t − 1 ) q ^ ( y ∣ x t − 1 ) d y = q ( x t ∣ x t − 1 ) ∫ y q ^ ( y ∣ x t − 1 ) d y = q ( x t ∣ x t − 1 ) \begin{aligned}
\hat{q}(\boldsymbol x_t|\boldsymbol x_{t-1}) &= \int_\boldsymbol y \hat{q}(\boldsymbol x_t, \boldsymbol y|\boldsymbol x_{t-1}) d\boldsymbol y \\
&= \int_\boldsymbol y \hat{q}(\boldsymbol x_t|\boldsymbol x_{t-1}, \boldsymbol y) \hat{q}(\boldsymbol y|\boldsymbol x_{t-1}) d\boldsymbol y \\
&= \int_\boldsymbol y q(\boldsymbol x_t|\boldsymbol x_{t-1}) \hat{q}(\boldsymbol y|\boldsymbol x_{t-1}) d\boldsymbol y \\
&= q(\boldsymbol x_t|\boldsymbol x_{t-1}) \int_\boldsymbol y \hat{q}(\boldsymbol y|\boldsymbol x_{t-1}) d\boldsymbol y \\
&= q(\boldsymbol x_t|\boldsymbol x_{t-1})
\end{aligned}
q ^ ( x t ∣ x t − 1 ) = ∫ y q ^ ( x t , y ∣ x t − 1 ) d y = ∫ y q ^ ( x t ∣ x t − 1 , y ) q ^ ( y ∣ x t − 1 ) d y = ∫ y q ( x t ∣ x t − 1 ) q ^ ( y ∣ x t − 1 ) d y = q ( x t ∣ x t − 1 ) ∫ y q ^ ( y ∣ x t − 1 ) d y = q ( x t ∣ x t − 1 )
这表明,在边缘化条件 y \boldsymbol y y
q ^ ( x t ) \hat{q}(\boldsymbol x_t) q ^ ( x t ) 这一步的目标是证明在所有时间步和初始状态上进行积分后,任意时刻 t t t q ^ ( x t ) \hat{q}(\boldsymbol x_t) q ^ ( x t ) q ( x t ) q(\boldsymbol x_t) q ( x t )
q ^ ( x t ) = ∫ x 0 : t − 1 q ^ ( x 0 : t ) d x 0 : t − 1 = ∫ x 0 : t − 1 q ^ ( x 0 ) q ^ ( x 1 : t ∣ x 0 ) d x 0 : t − 1 \begin{aligned}
\hat{q}(\boldsymbol x_t) &= \int_{\boldsymbol x_{0:t-1}} \hat{q}(\boldsymbol{x}_{0:t})d\boldsymbol{x}_{0:t-1} \\
&= \int_{\boldsymbol x_{0:t-1}} \hat{q}(\boldsymbol x_0)\hat{q}(\boldsymbol{x}_{1:t}|\boldsymbol x_0)d\boldsymbol{x}_{0:t-1}
\end{aligned}
q ^ ( x t ) = ∫ x 0 : t − 1 q ^ ( x 0 : t ) d x 0 : t − 1 = ∫ x 0 : t − 1 q ^ ( x 0 ) q ^ ( x 1 : t ∣ x 0 ) d x 0 : t − 1
为此需要求解 q ^ ( x 1 : t ∣ x 0 ) \hat{q}(\boldsymbol{x}_{1:t}|\boldsymbol x_0) q ^ ( x 1 : t ∣ x 0 )
q ^ ( x 1 : t ∣ x 0 ) = ∫ y q ^ ( x 1 : t , y ∣ x 0 ) d y = ∫ y q ^ ( y ∣ x 0 ) q ^ ( x 1 : t ∣ x 0 , y ) d y = ∫ y q ^ ( y ∣ x 0 ) ∏ i = 1 t q ^ ( x i ∣ x i − 1 , y ) d y ( Markov property ) = ∫ y q ^ ( y ∣ x 0 ) ∏ i = 1 t q ( x i ∣ x i − 1 ) d y = ( ∏ i = 1 t q ( x i ∣ x i − 1 ) ) ∫ y q ^ ( y ∣ x 0 ) d y = q ( x 1 : t ∣ x 0 ) ( ∫ y q ^ ( y ∣ x 0 ) d y = 1 ) \begin{aligned}
\hat{q}(\boldsymbol{x}_{1:t}|\boldsymbol x_0)&= \int_\boldsymbol y \hat{q}(\boldsymbol x_{1:t}, \boldsymbol y|\boldsymbol x_0) d\boldsymbol y= \int_\boldsymbol y \hat{q}(\boldsymbol y|\boldsymbol x_0)\hat{q}(\boldsymbol x_{1:t}|\boldsymbol x_0, \boldsymbol y) d\boldsymbol y\\
&= \int_\boldsymbol y \hat{q}(\boldsymbol y|\boldsymbol x_0)\prod_{i=1}^t \hat{q}(\boldsymbol x_i|\boldsymbol x_{i-1}, \boldsymbol y) d\boldsymbol y \quad (\text{Markov property}) \\
&= \int_\boldsymbol y \hat{q}(\boldsymbol y|\boldsymbol x_0)\prod_{i=1}^t q(\boldsymbol x_i|\boldsymbol x_{i-1}) d\boldsymbol y \\
&= \left(\prod_{i=1}^t q(\boldsymbol x_i|\boldsymbol x_{i-1})\right) \int_\boldsymbol y \hat{q}(\boldsymbol y|\boldsymbol x_0) d\boldsymbol y \\
&= q(\boldsymbol x_{1:t}|\boldsymbol x_0) \quad (\int_\boldsymbol y \hat{q}(\boldsymbol y|\boldsymbol x_0) d\boldsymbol y = 1)
\end{aligned}
q ^ ( x 1 : t ∣ x 0 ) = ∫ y q ^ ( x 1 : t , y ∣ x 0 ) d y = ∫ y q ^ ( y ∣ x 0 ) q ^ ( x 1 : t ∣ x 0 , y ) d y = ∫ y q ^ ( y ∣ x 0 ) i = 1 ∏ t q ^ ( x i ∣ x i − 1 , y ) d y ( Markov property ) = ∫ y q ^ ( y ∣ x 0 ) i = 1 ∏ t q ( x i ∣ x i − 1 ) d y = ( i = 1 ∏ t q ( x i ∣ x i − 1 ) ) ∫ y q ^ ( y ∣ x 0 ) d y = q ( x 1 : t ∣ x 0 ) ( ∫ y q ^ ( y ∣ x 0 ) d y = 1 )
这证明了 q ^ ( x 1 : t ∣ x 0 ) = q ( x 1 : t ∣ x 0 ) \hat{q}(\boldsymbol{x}_{1:t}|\boldsymbol x_0)=q(\boldsymbol x_{1:t}|\boldsymbol x_0) q ^ ( x 1 : t ∣ x 0 ) = q ( x 1 : t ∣ x 0 )
q ^ ( x t ) = ∫ x 0 : t − 1 q ^ ( x 0 ) q ^ ( x 1 : t ∣ x 0 ) d x 0 : t − 1 = ∫ x 0 : t − 1 q ( x 0 ) q ( x 1 : t ∣ x 0 ) d x 0 : t − 1 = ∫ x 0 : t − 1 q ( x 0 : t ) d x 0 : t − 1 = q ( x t ) \begin{aligned}
\hat{q}(\boldsymbol x_t)
&= \int_{\boldsymbol x_{0:t-1}} \hat{q}(\boldsymbol x_0)\hat{q}(\boldsymbol{x}_{1:t}|\boldsymbol x_0)d\boldsymbol{x}_{0:t-1} \\
&= \int_{\boldsymbol x_{0:t-1}}q(\boldsymbol x_0)q(\boldsymbol{x}_{1:t}|\boldsymbol x_0)d\boldsymbol{x}_{0:t-1} \\
&= \int_{\boldsymbol x_{0:t-1}} q(\boldsymbol x_{0:t})d\boldsymbol{x}_{0:t-1} = q(\boldsymbol x_t)
\end{aligned}
q ^ ( x t ) = ∫ x 0 : t − 1 q ^ ( x 0 ) q ^ ( x 1 : t ∣ x 0 ) d x 0 : t − 1 = ∫ x 0 : t − 1 q ( x 0 ) q ( x 1 : t ∣ x 0 ) d x 0 : t − 1 = ∫ x 0 : t − 1 q ( x 0 : t ) d x 0 : t − 1 = q ( x t )
这表明任意时刻 t t t q ^ ( x t ) \hat{q}(\boldsymbol x_t) q ^ ( x t ) q ( x t ) q(\boldsymbol x_t) q ( x t )
q ^ ( y ∣ x t − 1 , x t ) \hat{q} (\boldsymbol y| \boldsymbol x_{t-1}, \boldsymbol x_t) q ^ ( y ∣ x t − 1 , x t ) 这是贝叶斯公式中的关键似然项之一。我们希望简化它,理想情况下将其与一个易于建模的分类器联系起来
q ^ ( y ∣ x t − 1 , x t ) = q ^ ( x t ∣ x t − 1 , y ) q ^ ( y ∣ x t − 1 ) q ^ ( x t ∣ x t − 1 ) = q ( x t ∣ x t − 1 ) q ^ ( y ∣ x t − 1 ) q ( x t ∣ x t − 1 ) = q ^ ( y ∣ x t − 1 ) \begin{aligned}
\hat{q} (\boldsymbol y| \boldsymbol x_{t-1}, \boldsymbol x_t) &= \frac{\hat{q} (\boldsymbol x_t| \boldsymbol x_{t-1}, \boldsymbol y)\hat{q} (\boldsymbol y| \boldsymbol x_{t-1})}{\hat{q} (\boldsymbol x_t| \boldsymbol x_{t-1})} \\
&= \frac{q (\boldsymbol x_t| \boldsymbol x_{t-1})\hat{q} (\boldsymbol y| \boldsymbol x_{t-1})}{q (\boldsymbol x_t| \boldsymbol x_{t-1})} = \hat{q} (\boldsymbol y| \boldsymbol x_{t-1})
\end{aligned}
q ^ ( y ∣ x t − 1 , x t ) = q ^ ( x t ∣ x t − 1 ) q ^ ( x t ∣ x t − 1 , y ) q ^ ( y ∣ x t − 1 ) = q ( x t ∣ x t − 1 ) q ( x t ∣ x t − 1 ) q ^ ( y ∣ x t − 1 ) = q ^ ( y ∣ x t − 1 )
这个推导表明 q ^ ( y ∣ x t − 1 , x t ) = q ^ ( y ∣ x t − 1 ) \hat{q} (\boldsymbol y| \boldsymbol x_{t-1}, \boldsymbol x_t) = \hat{q} (\boldsymbol y| \boldsymbol x_{t-1}) q ^ ( y ∣ x t − 1 , x t ) = q ^ ( y ∣ x t − 1 ) x t − 1 \boldsymbol x_{t-1} x t − 1 x t \boldsymbol x_t x t y \boldsymbol y y y ↔ x t − 1 ↔ x t y \leftrightarrow \boldsymbol x_{t-1} \leftrightarrow \boldsymbol x_t y ↔ x t − 1 ↔ x t q ^ ( y ∣ x t − 1 ) \hat{q} (\boldsymbol y| \boldsymbol x_{t-1}) q ^ ( y ∣ x t − 1 ) p ϕ ( y ∣ x t − 1 ) p_\phi(\boldsymbol y|\boldsymbol x_{t-1}) p ϕ ( y ∣ x t − 1 )
现在我们将所有简化的部分代回到最初的贝叶斯公式
q ^ ( x t − 1 ∣ x t , y ) = q ^ ( x t − 1 ∣ x t ) q ^ ( y ∣ x t − 1 , x t ) q ^ ( y ∣ x t ) \hat{q}(\boldsymbol x_{t-1}|\boldsymbol x_t, \boldsymbol y) = \frac{\hat{q}(\boldsymbol x_{t-1}|\boldsymbol x_t)\hat{q} (\boldsymbol y| \boldsymbol x_{t-1}, \boldsymbol x_t)}{\hat{q}(\boldsymbol y|\boldsymbol x_t)}
q ^ ( x t − 1 ∣ x t , y ) = q ^ ( y ∣ x t ) q ^ ( x t − 1 ∣ x t ) q ^ ( y ∣ x t − 1 , x t )
根据我们的推导和假设:
q ^ ( x t − 1 ∣ x t ) ≈ q ( x t − 1 ∣ x t ) \hat{q}(\boldsymbol x_{t-1}|\boldsymbol x_t) \approx q(\boldsymbol x_{t-1}|\boldsymbol x_t) q ^ ( x t − 1 ∣ x t ) ≈ q ( x t − 1 ∣ x t ) q ( x t − 1 ∣ x t ) q(\boldsymbol x_{t-1}|\boldsymbol x_t) q ( x t − 1 ∣ x t ) q θ ( x t − 1 ∣ x t ) q_\theta(\boldsymbol x_{t-1}|\boldsymbol x_t) q θ ( x t − 1 ∣ x t ) q ^ ( y ∣ x t − 1 , x t ) = q ^ ( y ∣ x t − 1 ) \hat{q} (\boldsymbol y| \boldsymbol x_{t-1}, \boldsymbol x_t) = \hat{q} (\boldsymbol y| \boldsymbol x_{t-1}) q ^ ( y ∣ x t − 1 , x t ) = q ^ ( y ∣ x t − 1 ) q ϕ ( y ∣ x t − 1 ) q_\phi(\boldsymbol y|\boldsymbol x_{t-1}) q ϕ ( y ∣ x t − 1 ) 分母 q ^ ( y ∣ x t ) \hat{q}(\boldsymbol y|\boldsymbol x_t) q ^ ( y ∣ x t ) 1 / C 1/C 1 / C
因此,采样目标可以写成:
q ^ ( x t − 1 ∣ x t , y ) ∝ q ( x t − 1 ∣ x t ) × q ϕ ( y ∣ x t − 1 ) \hat{q}(\boldsymbol x_{t-1}|\boldsymbol x_t, \boldsymbol y) \propto q(\boldsymbol x_{t-1}|\boldsymbol x_t)\times q_\phi(\boldsymbol y|\boldsymbol x_{t-1})
q ^ ( x t − 1 ∣ x t , y ) ∝ q ( x t − 1 ∣ x t ) × q ϕ ( y ∣ x t − 1 )
这意味着条件逆向采样正比于原始 DDPM 的逆向采样 q ( x t − 1 ∣ x t ) q(\boldsymbol x_{t-1}|\boldsymbol x_t) q ( x t − 1 ∣ x t ) x t − 1 \boldsymbol x_{t-1} x t − 1 y \boldsymbol y y q ϕ ( y ∣ x t − 1 ) q_\phi(\boldsymbol y|\boldsymbol x_{t-1}) q ϕ ( y ∣ x t − 1 ) q ( x t − 1 ∣ x t ) q(\boldsymbol x_{t-1}|\boldsymbol x_t) q ( x t − 1 ∣ x t ) q ϕ ( y ∣ x t − 1 ) q_\phi(\boldsymbol y|\boldsymbol x_{t-1}) q ϕ ( y ∣ x t − 1 ) 就是一个分类器 。因此如果需要模型预测两个部分,一个模型就是 DDPM,预测 q θ ( x t − 1 ∣ x t ) q_\theta(\boldsymbol x_{t-1}|\boldsymbol x_t) q θ ( x t − 1 ∣ x t ) ϵ θ ( x t , t ) \boldsymbol\epsilon_\theta(\boldsymbol x_t, t) ϵ θ ( x t , t ) q ϕ ( y ∣ x t ) q_\phi(\boldsymbol y|\boldsymbol x_t) q ϕ ( y ∣ x t )
前面我们推导出理想的条件逆向采样满足(或者说,我们希望构造的条件逆向采样过程):
q ^ ( x t − 1 ∣ x t , y ) ∝ q ( x t − 1 ∣ x t ) × q ϕ ( y ∣ x t − 1 ) \hat{q}(\boldsymbol x_{t-1}|\boldsymbol x_t, \boldsymbol y) \propto q(\boldsymbol x_{t-1}|\boldsymbol x_t)\times q_\phi(\boldsymbol y|\boldsymbol x_{t-1})
q ^ ( x t − 1 ∣ x t , y ) ∝ q ( x t − 1 ∣ x t ) × q ϕ ( y ∣ x t − 1 )
这里的 q ( x t − 1 ∣ x t ) q(\boldsymbol x_{t-1}|\boldsymbol x_t) q ( x t − 1 ∣ x t ) q ϕ ( y ∣ x t − 1 ) q_\phi(\boldsymbol y|\boldsymbol x_{t-1}) q ϕ ( y ∣ x t − 1 ) x t − 1 \boldsymbol x_{t-1} x t − 1 y \boldsymbol y y
然而,这个公式直接应用存在一个核心问题:在 t t t x t − 1 \boldsymbol x_{t-1} x t − 1 q ϕ ( y ∣ x t − 1 ) q_\phi(\boldsymbol y|\boldsymbol x_{t-1}) q ϕ ( y ∣ x t − 1 ) x t − 1 \boldsymbol x_{t-1} x t − 1 x t \boldsymbol x_t x t
为了解决这个问题并实现有效的指导,Classifier Guidance 采用了以下关键技巧:
分类器作用于当前状态 x t \boldsymbol x_t x t x t − 1 \boldsymbol x_{t-1} x t − 1 q ϕ ( y ∣ x t − 1 ) q_\phi(\boldsymbol y|\boldsymbol x_{t-1}) q ϕ ( y ∣ x t − 1 ) q ϕ ( y ∣ x t , t ) q_\phi(\boldsymbol y|\boldsymbol x_t, t) q ϕ ( y ∣ x t , t ) 当前 的噪声图像 x t \boldsymbol x_t x t t t t y \boldsymbol y y x t − 1 \boldsymbol x_{t-1} x t − 1 x t \boldsymbol x_t x t
通过梯度引导均值 (Mean Perturbation via Gradient):原始 DDPM 的逆向采样步骤 p θ ( x t − 1 ∣ x t ) p_\theta(\boldsymbol x_{t-1}|\boldsymbol x_t) p θ ( x t − 1 ∣ x t ) q ( x t − 1 ∣ x t ) q(\boldsymbol x_{t-1}|\boldsymbol x_t) q ( x t − 1 ∣ x t ) N ( x t − 1 ; μ θ ( x t , t ) , σ t 2 I ) \mathcal{N}(\boldsymbol x_{t-1}; \boldsymbol\mu_\theta(\boldsymbol x_t, t), \sigma_t^2 \boldsymbol{I}) N ( x t − 1 ; μ θ ( x t , t ) , σ t 2 I ) μ θ ( x t , t ) \boldsymbol\mu_\theta(\boldsymbol x_t, t) μ θ ( x t , t ) ϵ θ ( x t , t ) \boldsymbol\epsilon_\theta(\boldsymbol x_t, t) ϵ θ ( x t , t )
μ θ ( x t , t ) = 1 α t ( x t − 1 − α t 1 − α ˉ t ϵ θ ( x t , t ) ) \boldsymbol\mu_\theta(\boldsymbol x_t, t) = \frac{1}{\sqrt{\alpha_t}}\left(\boldsymbol x_t - \frac{1-\alpha_t}{\sqrt{1-\bar{\alpha}_t}}\boldsymbol\epsilon_\theta(\boldsymbol x_t, t)\right)
μ θ ( x t , t ) = α t 1 ( x t − 1 − α ˉ t 1 − α t ϵ θ ( x t , t ) )
方差 σ t 2 \sigma_t^2 σ t 2 σ t 2 = β ~ t = 1 − α ˉ t − 1 1 − α ˉ t β t \sigma_t^2 = \tilde{\beta}_t = \frac{1-\bar{\alpha}_{t-1}}{1-\bar{\alpha}_t}\beta_t σ t 2 = β ~ t = 1 − α ˉ t 1 − α ˉ t − 1 β t σ t 2 = β t \sigma_t^2 = \beta_t σ t 2 = β t
Classifier Guidance 的核心思想是利用分类器 q ϕ ( y ∣ x t , t ) q_\phi(\boldsymbol y|\boldsymbol x_t, t) q ϕ ( y ∣ x t , t ) μ θ ( x t , t ) \boldsymbol\mu_\theta(\boldsymbol x_t, t) μ θ ( x t , t ) y \boldsymbol y y x t − 1 \boldsymbol x_{t-1} x t − 1
我们可以考虑以下推导。这对应了后验分布 $ q(\boldsymbol x_{t-1}|\boldsymbol x_t, \boldsymbol y) $ 的一种建模思路。通过贝叶斯定理(并关注对数概率):
log q ( x t − 1 ∣ x t , y ) = log p θ ( x t ∣ x t − 1 ) + log p θ ( y ∣ x t ) − log Z ( x t , y ) \log q(\boldsymbol x_{t-1}|\boldsymbol x_t, \boldsymbol y) = \log p_\theta(\boldsymbol x_t|\boldsymbol x_{t-1}) + \log p_\theta(\boldsymbol y|\boldsymbol x_t) - \log Z(\boldsymbol x_t, \boldsymbol y)
log q ( x t − 1 ∣ x t , y ) = log p θ ( x t ∣ x t − 1 ) + log p θ ( y ∣ x t ) − log Z ( x t , y )
其中 Z ( x t , y ) Z(\boldsymbol x_t, \boldsymbol y) Z ( x t , y ) x t − 1 \boldsymbol x_{t-1} x t − 1 x t \boldsymbol x_t x t
p θ ( x t ∣ x t − 1 ) = N ( x t ; μ ( x t − 1 ) , Σ ( x t − 1 ) ) p_\theta(\boldsymbol x_t|\boldsymbol x_{t-1}) = \mathcal{N}(\boldsymbol x_t; \boldsymbol\mu(\boldsymbol x_{t-1}), \boldsymbol\Sigma(\boldsymbol x_{t-1}))
p θ ( x t ∣ x t − 1 ) = N ( x t ; μ ( x t − 1 ) , Σ ( x t − 1 ) )
忽略常数项,其对数概率为:
log p θ ( x t ∣ x t − 1 ) ≈ − 1 2 ( x t − μ ) T Σ − 1 ( x t − μ ) \log p_\theta(\boldsymbol x_t|\boldsymbol x_{t-1}) \approx -\frac{1}{2}(\boldsymbol x_t - \boldsymbol\mu)^T \boldsymbol\Sigma^{-1}(\boldsymbol x_t - \boldsymbol\mu)
log p θ ( x t ∣ x t − 1 ) ≈ − 2 1 ( x t − μ ) T Σ − 1 ( x t − μ )
对于 log p θ ( y ∣ x t ) \log p_\theta(\boldsymbol y|\boldsymbol x_t) log p θ ( y ∣ x t ) Σ \boldsymbol\Sigma Σ x t \boldsymbol x_t x t μ \boldsymbol\mu μ x t = μ \boldsymbol x_t = \boldsymbol\mu x t = μ
log p θ ( y ∣ x t ) ≈ log p θ ( y ∣ μ ) + ( x t − μ ) T ∇ x t log p θ ( y ∣ x t ) ∣ x t = μ \log p_\theta(\boldsymbol y|\boldsymbol x_t) \approx \log p_\theta(\boldsymbol y|\boldsymbol\mu) + (\boldsymbol x_t - \boldsymbol\mu)^T \nabla_{\boldsymbol x_t} \log p_\theta(\boldsymbol y|\boldsymbol x_t)\big|_{\boldsymbol x_t=\boldsymbol\mu}
log p θ ( y ∣ x t ) ≈ log p θ ( y ∣ μ ) + ( x t − μ ) T ∇ x t log p θ ( y ∣ x t ) ∣ ∣ ∣ x t = μ
记梯度项为 g = ∇ x t log p θ ( y ∣ x t ) ∣ x t = μ \boldsymbol g = \nabla_{\boldsymbol x_t} \log p_\theta(\boldsymbol y|\boldsymbol x_t)\big|_{\boldsymbol x_t=\boldsymbol\mu} g = ∇ x t log p θ ( y ∣ x t ) ∣ ∣ ∣ x t = μ
log p θ ( y ∣ x t ) ≈ const + ( x t − μ ) T g \log p_\theta(\boldsymbol y|\boldsymbol x_t) \approx \text{const} + (\boldsymbol x_t - \boldsymbol\mu)^T \boldsymbol g
log p θ ( y ∣ x t ) ≈ const + ( x t − μ ) T g
将两项合并到 log q ( x t − 1 ∣ x t , y ) \log q(\boldsymbol x_{t-1}|\boldsymbol x_t, \boldsymbol y) log q ( x t − 1 ∣ x t , y ) μ \boldsymbol\mu μ Σ \boldsymbol\Sigma Σ x t − 1 \boldsymbol x_{t-1} x t − 1 x t \boldsymbol x_t x t
log q ( ⋅ ∣ ⋅ , y ) ≈ − 1 2 ( x t − μ ) T Σ − 1 ( x t − μ ) + ( x t − μ ) T g \log q(\cdot|\cdot, \boldsymbol y) \approx -\frac{1}{2}(\boldsymbol x_t - \boldsymbol\mu)^T \boldsymbol\Sigma^{-1}(\boldsymbol x_t - \boldsymbol\mu) + (\boldsymbol x_t - \boldsymbol\mu)^T \boldsymbol g
log q ( ⋅ ∣ ⋅ , y ) ≈ − 2 1 ( x t − μ ) T Σ − 1 ( x t − μ ) + ( x t − μ ) T g
通过配方法(Completing the Square)整理上式:
− 1 2 ( x t − μ ) T Σ − 1 ( x t − μ ) + ( x t − μ ) T g = − 1 2 [ ( x t − μ ) T Σ − 1 ( x t − μ ) − 2 ( x t − μ ) T g ] = − 1 2 [ ( x t − μ ) T Σ − 1 ( x t − μ ) − 2 ( x t − μ ) T Σ − 1 ( Σ g ) ] = − 1 2 ( ( x t − μ ) − Σ g ) T Σ − 1 ( ( x t − μ ) − Σ g ) + 1 2 ( Σ g ) T Σ − 1 ( Σ g ) = − 1 2 ( x t − ( μ + Σ g ) ) T Σ − 1 ( x t − ( μ + Σ g ) ) + const log q ( x t − 1 ∣ x t , y ) ∼ N ( x t − 1 ; μ + Σ , Σ 2 ) \begin{aligned}
&-\frac{1}{2}(\boldsymbol x_t - \boldsymbol\mu)^T \boldsymbol\Sigma^{-1}(\boldsymbol x_t - \boldsymbol\mu) + (\boldsymbol x_t - \boldsymbol\mu)^T \boldsymbol g \\
&= -\frac{1}{2} \left[ (\boldsymbol x_t - \boldsymbol\mu)^T \boldsymbol\Sigma^{-1}(\boldsymbol x_t - \boldsymbol\mu) - 2(\boldsymbol x_t - \boldsymbol\mu)^T \boldsymbol g \right] \\
&= -\frac{1}{2} \left[ (\boldsymbol x_t - \boldsymbol\mu)^T \boldsymbol\Sigma^{-1}(\boldsymbol x_t - \boldsymbol\mu) - 2(\boldsymbol x_t - \boldsymbol\mu)^T \boldsymbol\Sigma^{-1} (\boldsymbol\Sigma \boldsymbol g) \right] \\
&= -\frac{1}{2} \left( (\boldsymbol x_t - \boldsymbol\mu) - \boldsymbol\Sigma \boldsymbol g \right)^T \boldsymbol\Sigma^{-1} \left( (\boldsymbol x_t - \boldsymbol\mu) - \boldsymbol\Sigma \boldsymbol g \right) + \frac{1}{2} (\boldsymbol\Sigma \boldsymbol g)^T \boldsymbol\Sigma^{-1} (\boldsymbol\Sigma \boldsymbol g) \\
&= -\frac{1}{2}(\boldsymbol x_t - (\boldsymbol\mu + \boldsymbol\Sigma \boldsymbol g))^T \boldsymbol\Sigma^{-1}(\boldsymbol x_t - (\boldsymbol\mu + \boldsymbol\Sigma \boldsymbol g)) + \text{const} \\
&\log q(\boldsymbol x_{t-1}|\boldsymbol x_t, \boldsymbol y) \sim \mathcal{N}(\boldsymbol x_{t-1}; \boldsymbol\mu + \boldsymbol \Sigma, \boldsymbol \Sigma^2)
\end{aligned}
− 2 1 ( x t − μ ) T Σ − 1 ( x t − μ ) + ( x t − μ ) T g = − 2 1 [ ( x t − μ ) T Σ − 1 ( x t − μ ) − 2 ( x t − μ ) T g ] = − 2 1 [ ( x t − μ ) T Σ − 1 ( x t − μ ) − 2 ( x t − μ ) T Σ − 1 ( Σ g ) ] = − 2 1 ( ( x t − μ ) − Σ g ) T Σ − 1 ( ( x t − μ ) − Σ g ) + 2 1 ( Σ g ) T Σ − 1 ( Σ g ) = − 2 1 ( x t − ( μ + Σ g ) ) T Σ − 1 ( x t − ( μ + Σ g ) ) + const log q ( x t − 1 ∣ x t , y ) ∼ N ( x t − 1 ; μ + Σ , Σ 2 )
这表明,在上述近似下,后验分布(或与 x t \boldsymbol x_t x t μ \boldsymbol\mu μ μ post = μ + Σ g \boldsymbol\mu_{\text{post}} = \boldsymbol\mu + \boldsymbol\Sigma \boldsymbol g μ post = μ + Σ g
如果一个高斯分布的对数概率叠加上一个(近似)线性项 ( v − μ o l d ) T g (\boldsymbol v - \boldsymbol\mu_{old})^T \boldsymbol g ( v − μ o l d ) T g v T g ′ \boldsymbol v^T \boldsymbol g' v T g ′ μ o l d \boldsymbol\mu_{old} μ o l d μ o l d + Σ g \boldsymbol\mu_{old} + \boldsymbol\Sigma \boldsymbol g μ o l d + Σ g μ o l d + Σ g ′ \boldsymbol\mu_{old} + \boldsymbol\Sigma \boldsymbol g' μ o l d + Σ g ′
将此原理应用于我们对 x t − 1 \boldsymbol x_{t-1} x t − 1 μ θ ( x t , t ) \boldsymbol\mu_\theta(\boldsymbol x_t, t) μ θ ( x t , t ) μ θ ( x t , t ) \boldsymbol\mu_\theta(\boldsymbol x_t, t) μ θ ( x t , t ) σ t 2 I \sigma_t^2 \boldsymbol{I} σ t 2 I ∇ x t log q ϕ ( y ∣ x t , t ) \nabla_{\boldsymbol x_t} \log q_\phi(\boldsymbol y|\boldsymbol x_t, t) ∇ x t log q ϕ ( y ∣ x t , t ) μ θ ( x t , t ) + σ t 2 I ⋅ ∇ x t log q ϕ ( y ∣ x t , t ) \boldsymbol\mu_\theta(\boldsymbol x_t, t) + \sigma_t^2 \boldsymbol{I} \cdot \nabla_{\boldsymbol x_t} \log q_\phi(\boldsymbol y|\boldsymbol x_t, t) μ θ ( x t , t ) + σ t 2 I ⋅ ∇ x t log q ϕ ( y ∣ x t , t ) s s s
修改后的均值 μ ^ ( x t , y , t ) \hat{\boldsymbol\mu}(\boldsymbol x_t, \boldsymbol y, t) μ ^ ( x t , y , t )
μ ^ ( x t , y , t ) = μ θ ( x t , t ) + s ⋅ σ t 2 ∇ x t log q ϕ ( y ∣ x t , t ) \hat{\boldsymbol\mu}(\boldsymbol x_t, \boldsymbol y, t) = \boldsymbol\mu_\theta(\boldsymbol x_t, t) + s \cdot \sigma_t^2 \nabla_{\boldsymbol x_t} \log q_\phi(\boldsymbol y|\boldsymbol x_t, t)
μ ^ ( x t , y , t ) = μ θ ( x t , t ) + s ⋅ σ t 2 ∇ x t log q ϕ ( y ∣ x t , t )
其中:
∇ x t log q ϕ ( y ∣ x t , t ) \nabla_{\boldsymbol x_t} \log q_\phi(\boldsymbol y|\boldsymbol x_t, t) ∇ x t log q ϕ ( y ∣ x t , t ) x t \boldsymbol x_t x t y \boldsymbol y y s s s s = 0 s=0 s = 0 s s s y \boldsymbol y y σ t 2 \sigma_t^2 σ t 2 p θ ( x t − 1 ∣ x t ) p_\theta(\boldsymbol x_{t-1}|\boldsymbol x_t) p θ ( x t − 1 ∣ x t )
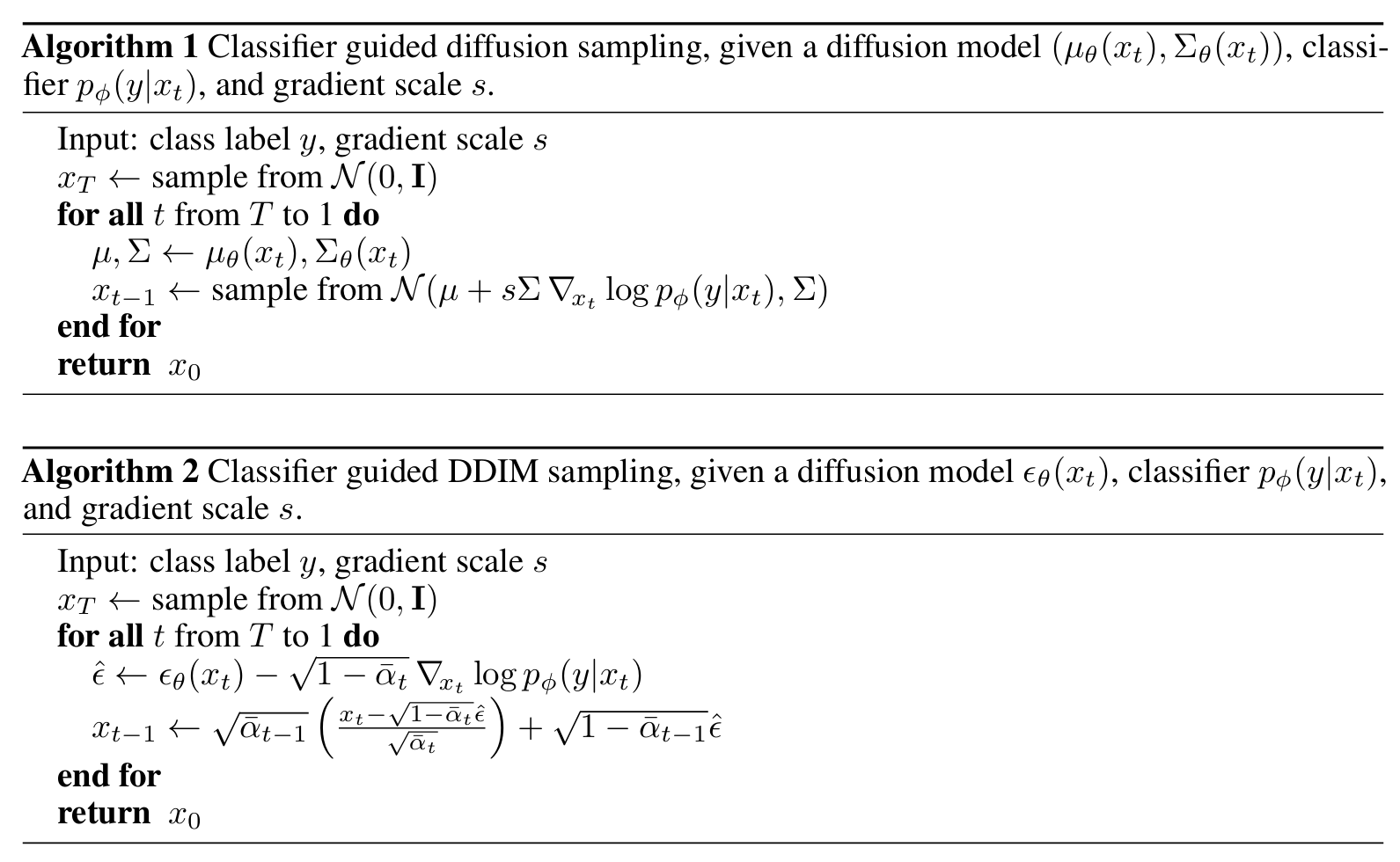
因此,在每个逆向采样步骤 t t t T T T 1 1 1 ϵ θ ( x t , t ) \boldsymbol\epsilon_\theta(\boldsymbol x_t, t) ϵ θ ( x t , t ) μ θ ( x t , t ) \boldsymbol\mu_\theta(\boldsymbol x_t, t) μ θ ( x t , t ) q ϕ ( y ∣ x t , t ) q_\phi(\boldsymbol y|\boldsymbol x_t, t) q ϕ ( y ∣ x t , t ) ∇ x t log q ϕ ( y ∣ x t , t ) \nabla_{\boldsymbol x_t} \log q_\phi(\boldsymbol y|\boldsymbol x_t, t) ∇ x t log q ϕ ( y ∣ x t , t ) μ ^ ( x t , y , t ) \hat{\boldsymbol\mu}(\boldsymbol x_t, \boldsymbol y, t) μ ^ ( x t , y , t ) x t − 1 \boldsymbol x_{t-1} x t − 1
x t − 1 ∼ N ( x t − 1 ; μ ^ ( x t , y , t ) , σ t 2 I ) \boldsymbol x_{t-1} \sim \mathcal{N}(\boldsymbol x_{t-1}; \hat{\boldsymbol\mu}(\boldsymbol x_t, \boldsymbol y, t), \sigma_t^2 \mathbf{I})
x t − 1 ∼ N ( x t − 1 ; μ ^ ( x t , y , t ) , σ t 2 I )
这个指导技巧与基于分数的生成模型 (Score-based Generative Models) 的联系。在这些模型中,条件生成的关键在于估计条件概率分布 p t ( x t ∣ y ) p_t(\boldsymbol x_t|\boldsymbol y) p t ( x t ∣ y ) ∇ x t log p t ( x t ∣ y ) \nabla_{\boldsymbol x_t} \log p_t(\boldsymbol x_t|\boldsymbol y) ∇ x t log p t ( x t ∣ y )
根据贝叶斯定理,p t ( x t ∣ y ) = p t ( y ∣ x t ) p t ( x t ) p t ( y ) p_t(\boldsymbol x_t|\boldsymbol y) = \frac{p_t(\boldsymbol y|\boldsymbol x_t) p_t(\boldsymbol x_t)}{p_t(\boldsymbol y)} p t ( x t ∣ y ) = p t ( y ) p t ( y ∣ x t ) p t ( x t ) x t \boldsymbol x_t x t
∇ x t log p t ( x t ∣ y ) = ∇ x t log p t ( x t ) ⏟ 原始分数 + ∇ x t log p t ( y ∣ x t ) ⏟ 条件分数 \nabla_{\boldsymbol x_t} \log p_t(\boldsymbol x_t|\boldsymbol y) = \underbrace{\nabla_{\boldsymbol x_t} \log p_t(\boldsymbol x_t)}_{\text{原始分数}} + \underbrace{\nabla_{\boldsymbol x_t} \log p_t(\boldsymbol y|\boldsymbol x_t)}_{\text{条件分数}}
∇ x t log p t ( x t ∣ y ) = 原始分数 ∇ x t log p t ( x t ) + 条件分数 ∇ x t log p t ( y ∣ x t )
这表明条件分布的分数等于无条件分布的分数与似然函数(由分类器给出)的分数之和。
原始分数: ∇ x t log p t ( x t ) \nabla_{\boldsymbol x_t} \log p_t(\boldsymbol x_t) ∇ x t log p t ( x t ) ϵ θ ( x t , t ) \boldsymbol\epsilon_\theta(\boldsymbol x_t, t) ϵ θ ( x t , t ) s θ ( x t , t ) = − ϵ θ ( x t , t ) 1 − α ˉ t \boldsymbol s_\theta(\boldsymbol x_t, t) = -\frac{\boldsymbol\epsilon_\theta(\boldsymbol x_t, t)}{\sqrt{1-\bar{\alpha}_t}} s θ ( x t , t ) = − 1 − α ˉ t ϵ θ ( x t , t ) q t ( x t ) q_t(\boldsymbol x_t) q t ( x t ) p t ( x t ) p_t(\boldsymbol x_t) p t ( x t ) ∇ x t log q t ( x t ) \nabla_{\boldsymbol x_t} \log q_t(\boldsymbol x_t) ∇ x t log q t ( x t ) μ θ ( x t , t ) \boldsymbol\mu_\theta(\boldsymbol x_t, t) μ θ ( x t , t )
条件分数: ∇ x t log p t ( y ∣ x t ) \nabla_{\boldsymbol x_t} \log p_t(\boldsymbol y|\boldsymbol x_t) ∇ x t log p t ( y ∣ x t ) q ϕ ( y ∣ x t , t ) q_\phi(\boldsymbol y|\boldsymbol x_t, t) q ϕ ( y ∣ x t , t ) ∇ x t log q ϕ ( y ∣ x t , t ) \nabla_{\boldsymbol x_t} \log q_\phi(\boldsymbol y|\boldsymbol x_t, t) ∇ x t log q ϕ ( y ∣ x t , t )
因此,通过调整均值 μ θ ( x t , t ) \boldsymbol\mu_\theta(\boldsymbol x_t, t) μ θ ( x t , t ) μ ^ ( x t , y , t ) \hat{\boldsymbol\mu}(\boldsymbol x_t, \boldsymbol y, t) μ ^ ( x t , y , t ) ϵ θ \boldsymbol\epsilon_\theta ϵ θ y \boldsymbol y y
这种方法非常巧妙,因为它避免了从头开始训练一个复杂的条件扩散模型。我们只需要一个预训练的无条件 DDPM 和一个在(可能带噪的)数据上训练的分类器,就可以实现高质量、可控的条件图像生成。这体现了模块化和组合优化的思想