planning
Planning:概念、分类与价值
引言
在强化学习领域,“planning”(规划)是智能体通过内部模拟环境进行决策的能力。与直接通过环境交互的试错学习不同,规划让智能体能够在「想象」中预演未来可能发生的场景。
即:Planning 指智能体利用环境模型(model)在内部生成虚拟经验,通过模拟状态转移和奖励反馈来优化策略的过程。其本质是通过「思维实验」降低对真实环境交互的依赖
1.2 与学习的区别
| 维度 | Planning | Learning |
|---|---|---|
| 数据来源 | 内部模型生成 | 真实环境交互 |
| 计算开销 | 前期模型构建成本高 | 后期策略优化成本高 |
| 典型方法 | 动态规划、MCTS | Q-learning、PG |
例如,我们可以类似对标 Q-learning 算法创造 Q-planning 算法:
重复以下步骤:
- 随机选择一个状态 和一个动作
- 把 输入采样模型,然后获得采样得到的奖励 和下一个状态
- 对 进行一时间步表格 Q 学习:
规划方法的双重维度
规划分为状态空间的规划(state-space planning)和规划空间(plan-space planning)的规划:
-
状态空间的规划(state-space planning):在状态空间搜索最佳策略,这是最常见的
-
规划空间的规划(plan-space planning):在规划空间搜索最佳策略,包括遗传算法和偏序规划。这时,一个规划就是一个动作集合以及动作顺序的约束,这时的状态就是一个规划,目标状态就是能完成任务的规划
在连续状态空间(或者很大的状态空间)中,智能体不可能能把所有的状态-动作数据全部收集到,好的规划能够对环境进行提前的建模,能够让模型做出一些靠谱的泛化
Dyna 算法
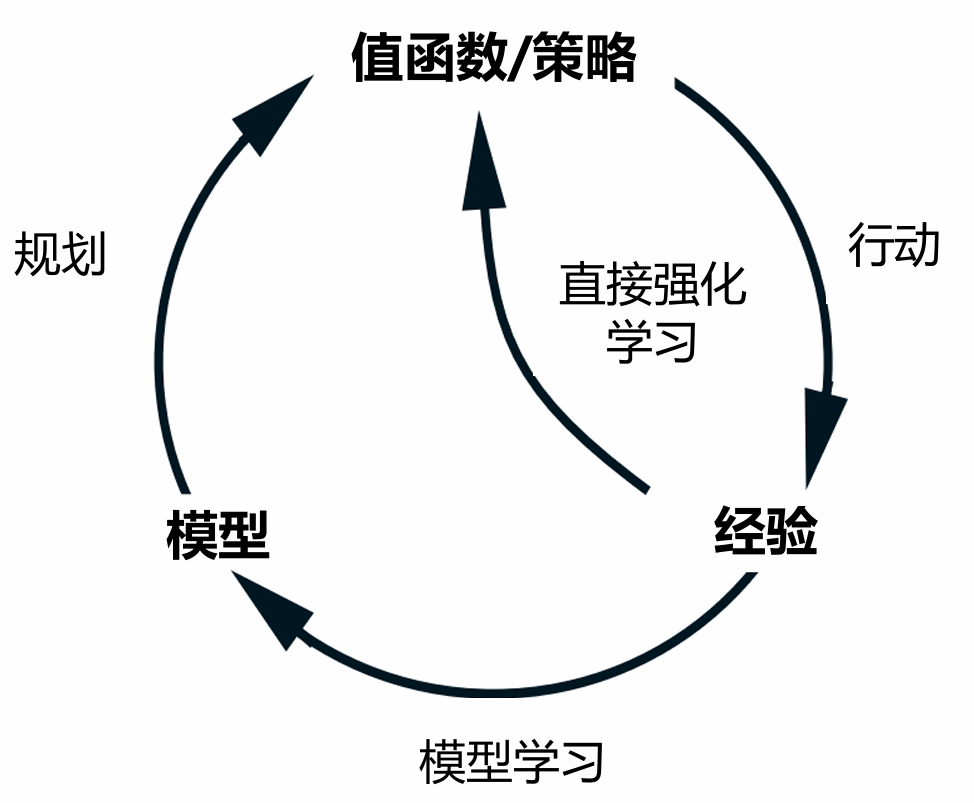
Dyna 算法由强化学习先驱 Richard Sutton 提出,重要性在于统一了实时学习(learning)与离线规划(planning)。该架构创造性地让智能体能够:
- 从真实交互中学习(环境反馈)
- 从想象中学习(模型模拟)
- 两类经验并行处理实现知识融合
算法工作流程
graph LR
A[真实经验] --> B[更新Q值]
A --> C[更新环境模型]
C --> D[模拟经验生成]
D --> E[模型规划更新Q值]
B --> F[策略改进]
E --> F
真实经验同时用于模型的学习和直接的强化学习:
| 维度 | Dyna-Q | 传统Q-learning |
|---|---|---|
| 样本效率 | 1次交互触发n次更新 | 1次交互对应1次更新 |
| 收敛速度 | 快3-5倍(迷宫实验) | 基础速度基准 |
| 模型依赖性 | 需要构建状态转移模型 | 无需环境模型 |
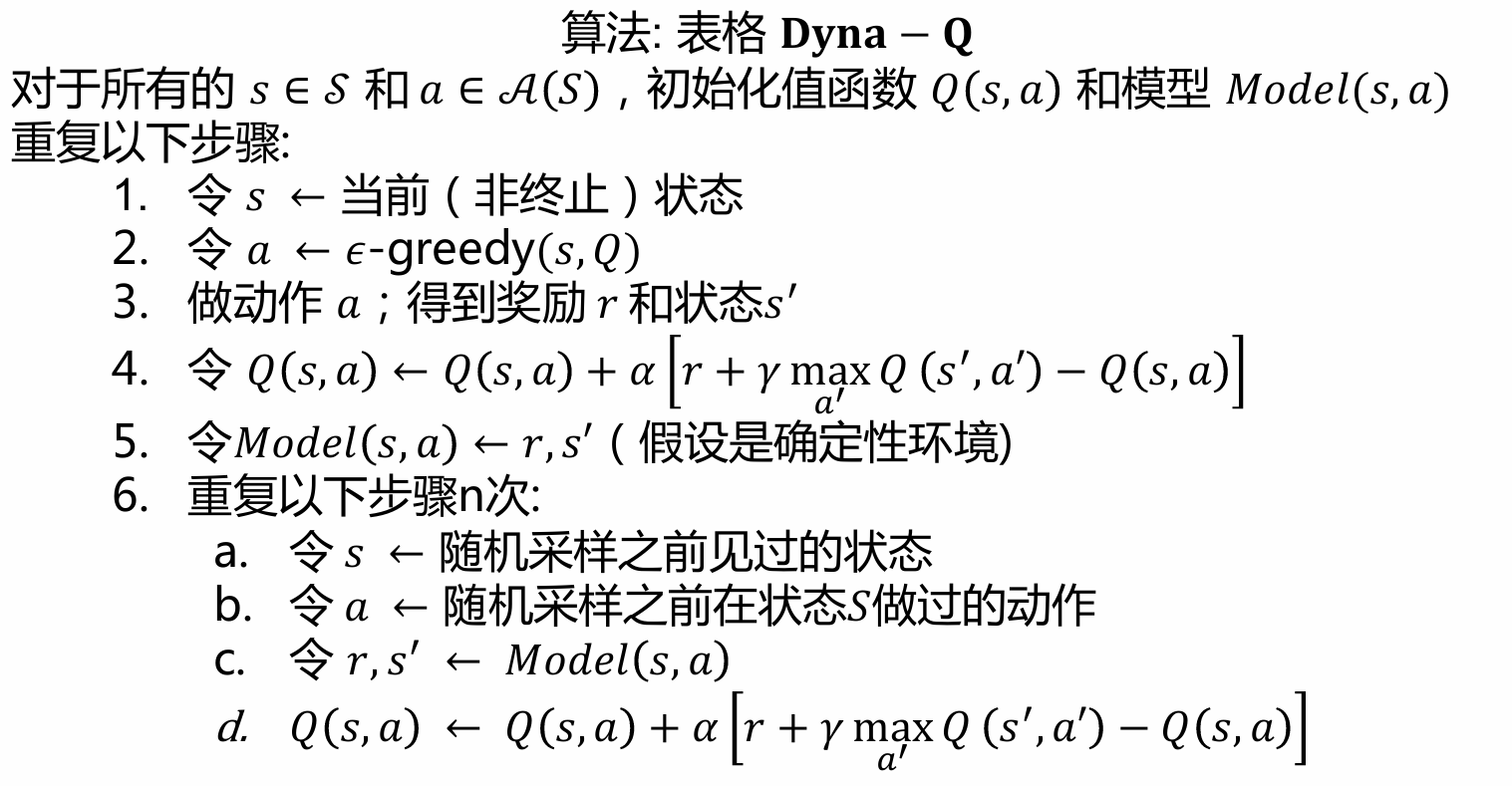
可以类似构建 Dyna-Q 算法:
规划与学习进一步融合:决策时规划
实时动态规划(DTDP)
实时动态规划(Real-Time Dynamic Programming)是针对大规模状态空间和实时决策需求设计的规划范式。与传统动态规划遍历所有状态的「地毯式搜索」不同(尽管动态规划相比于传统的其他算法可以减少计算量,但是他仍然是把所有的状态全部遍历了一遍的),RTDP采用聚焦更新策略:
-
状态更新优先级:仅更新智能体当前遭遇的状态及其可达后续状态
-
启发式引导:利用启发函数 引导搜索方向,避免无效状态探索
这种方式极大地减少了状态空间,AlphaGo 中使用的技术就是使用了 DTDP 而非传统的 DP
与传统动态规划的对比
| 维度 | RTDP | 传统DP(值迭代) |
|---|---|---|
| 计算复杂度 | 每次更新k个相关状态 | 全状态空间遍历 |
| 内存占用 | 仅需存储活跃状态值 | 需存储全状态空间值 |
| 适用场景 | 在线实时决策(如自动驾驶) | 离线规划(如棋类求解) |
| 收敛条件 | -收敛于最优策略 | 严格收敛到最优策略 |
| 典型更新方式 | 异步更新 | 同步全局更新 |
1 | |
决策时规划
这里我们又提出了一个新的概念:决策时规划。我们现在将规划分为两类:
- 背景规划(back ground planning):规划用于更细你很多状态值共后续动作的选择,例如 Dyna,Q-planning 等。在前面,我们提到的算法全部被划分为背景规划
- 决策时规划(decision time planning):规划只着眼于当前状态的动作选择。目前火爆的 world model 视频生成器就可以认为是一个用于决策时规划的模型(为自动驾驶服务),最终目的就是给一个 insight 的启发式函数来指导决策
一句话来概括:背景规划用于规划所有状态下的对象,而决策时规划只用于给出当前状态下对环境的启发式函数(类似启发式搜索,性能的提升不是来自于多步更新,而是来自于专注于当前状态的后续可能)
为了介绍 MCMC 方法,我们需要先介绍一下 Rollout 算法和
Rollout 算法:
Rollout 算法是一种用于强化学习中的策略评估和优化的方法。它通过从当前状态下进行模拟的蒙特卡洛估计,选取最高估计值的动作,是一种决策是规划的算法,表现取决于蒙特卡洛算法的估值的准确性
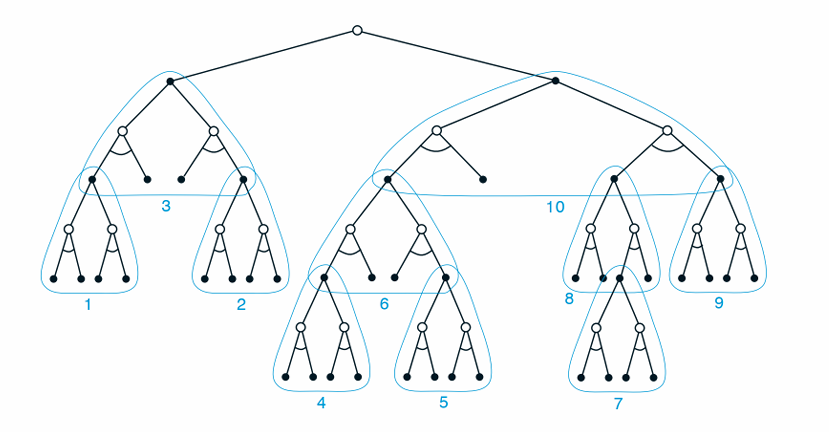
就是一种树搜索算法,将所有的轨迹展开到叶子节点并选择一个最优的轨迹,这种算法相当的低效,可以限制搜索的最大深度进行截断(将后续的值代替回报)来减少计算量(类似 beam search)
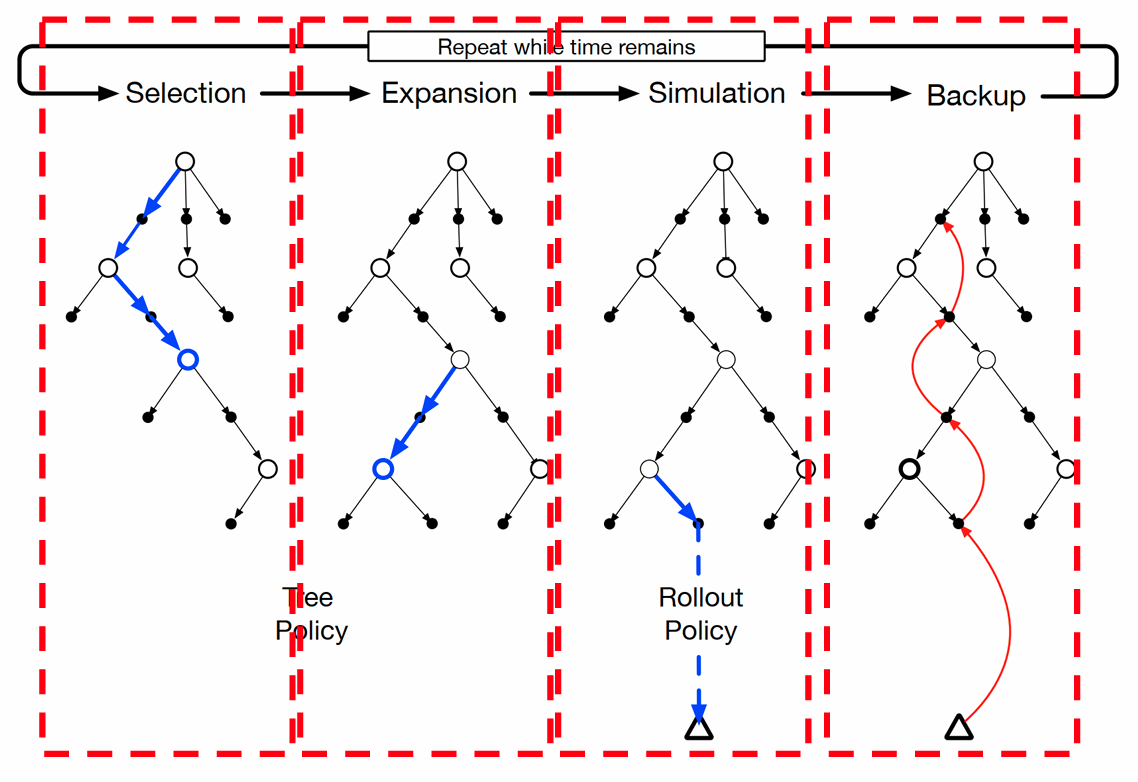
蒙特卡洛数搜索(Monte Carlo Tree Search):
- 选择:根据树策略(动作值函数)遍历树到一个叶节点
- 扩展:从选择的叶节点出发选择未探索过的动作到达新的状态
- 模拟:从新的状态出发按照 rollout 策略进行轨迹模拟
- 回溯:得到的回报回溯更新树策略,rollout 访问的状态值不会被保存
- 重复上述步骤直至计算资源耗尽,从根节点选择最优动作
- 得到新状态,保留原有树的新状态下的部分节点
- 重复上述步骤直至游戏结束
就是按照一种特定的方式进行树展开,然后使用 roll out 算法对展开的节点进行值估计,可以认为是启发式搜索和 rollout 的一种结合(探索和利用的结合)