MDP的进一步思考
序列回报的形式:
问题描述:为何序列回报 Gt 的形式是通过指数加权求和衰减,即是通过将当前时刻及之后的所有奖励进行加权求和得到的:
Gt=Rt+γRt+1+γ2Rt+2+⋯=k=0∑∞γkRt+k
关于这个的定义来源,我们需要先明确我们的要求是什么,我们的需求是用一个值函数去评判序列的好坏,即我们需要构建序列之间的全序,即是对任意两个序列,需要有孰好孰坏之分,这种好坏有两种要求:
- 奖励更多的序列值函数更好:[1,2,3]≺[2,3,4]
- 根据时间衰减的原则,相同回报下近期的回报比远期回报好:[1,0,0]≺[0,0,1]
定理
如果希望对于序列有全序,并满足以下性质:
[a1,a2,⋯]<[b1,b2,⋯]⇔[r,a1,a2,⋯]<[r,b1,b2,⋯]
那么序列回报形式只会是上述 γ− 衰减求和形式。
证明思路
如果有 a0+γ1a1>b0+γ1b1⇔r+γ1a0+γ2a1>r+γ1b0+γ2b1
那么 (a0−b0)+γ1(a1−b1)>0⇔γ1(a0−b0)+γ2(a1−b1)>0
因此 γ2=γ12 后续时间步的 γt 可以以此类推
策略与占用度量
价值函数的重构
考虑折扣回报的期望:
\begin{align*}
V^\pi(s_0) &= \mathbb{E}_\pi\left[ \sum_{t=0}^\infty \gamma^t r(S_t,A_t) \right] \\
&= \sum_{t=0}^\infty \gamma^t \mathbb{E}_\pi[r(S_t,A_t)] \quad \text{(期望线性性)} \\
&= \sum_{t=0}^\infty \gamma^t \sum_{s,a} P^\pi(S_t=s, A_t=a)r(s,a) \\
&= \frac{1}{1-\gamma} \underbrace{(1-\gamma)\sum_{t=0}^\infty \gamma^t \sum_{s,a} P^\pi(S_t=s, A_t=a)r(s,a)}_{\sum_{s,a}\rho^\pi(s,a)r(s,a)}
\end{align*}
最终得到价值函数的密度表达:
Vπ=1−γ1s,a∑ρπ(s,a)r(s,a)
对偶视角
πmaxEπ[t=0∑∞γtr(St,At)]
ρmaxs,a∑ρ(s,a)r(s,a)s.t.{ρ(s,a)≥0∑aρ(s,a)=(1−γ)μ0(s)+γ∑s′,a′ρ(s′,a′)P(s∣s′,a′)
为策略优化提供对偶空间视角:
graph TD
A[原始空间] -->|策略参数θ| B[价值最大化]
C[对偶空间] -->|占用度量ρ| D[约束满足]
B <-->|强对偶性| D
D为满足贝尔曼流约束的可行域。这种视角为:
- 策略梯度方法提供理论支撑
- 原始-对偶优化算法奠定基础
- 安全约束处理开辟新路径
强对偶性证明思路:
- 构造拉格朗日函数,引入状态分布的约束
- 通过对偶变量将约束转化为惩罚项
- 证明原始问题与对偶问题的最优值相等
在前面分析过,策略空间和占用度量空间是存在双射关系的,即 π 和 ρπ 一一对应,当策略进行更新的时候,占用度量的更新是不可知的(除非非常简单的情况),因此强化学习优化策略的难点在于,如何在改变策略的时候能优化问题,因此在优化策略的时候,我们需要对策略进行策略评估(policy evaluation)和策略提升(policy improvement)
其中用于策略评估的方法就是动作值函数和状态值函数,下面我们定义策略提升
策略提升(policy improvement)
定义
对于两个策略 π 和 π′,如果满足如下性质,称 π′ 是 π 的策略提升:
- 对于任何状态 s(所有的 state 均满足),有
Qπ(s,π′(s))≥Vπ(s)
这个式子的含义是,只在当前一步进行策略改变,而在后续决策过程中策略仍然不变,如果这一步策略改变能够带来更高的值函数,那么策略就称之为提升了
一些思考
实际上我觉得这个式子存在不严谨的地方,实际上我认为在数学上应该这样写:
Eπ′[Qπ(s,π′(s))∣St=s]≥Vπ(s)
Qπ 的定义中只对状态转移取期望,而 π′ 如果是一个随机策略的话,Qπ(s,π′(s)) 就不是一个确定的值了,所以正确写法是否应该是上面的期望表达式。但是在主流的强化学习课本上都写的是没有取期望的表达式,应该是默认的期望表达式
策略提升定理 (Policy Improvement Theorem)
对于两个策略 π, π′,如果满足如下性质:对于任何状态 s,有 Qπ(s,π′(s))≥Vπ(s),则有 Vπ′(s)≥Vπ(s),则称 π′ 是 π 的策略提升
Vπ(s)≤Qπ(s,π′(s))=EEnv[Rt+γVπ(St+1)∣St=s,At=π′(s)]=Eπ′[Rt+γVπ(St+1)∣St=s]≤Eπ′[Rt+γQπ(St+1,π′(St+1))∣St=s]=Eπ′[Rt+γEEnv[Rt+1+γVπ(St+2)∣St+1,At+1=π′(St+1)]∣St=s]=Eπ′[Rt+γRt+1+γ2Vπ(St+2)∣St=s]≤Eπ′[Rt+γRt+1+γ2Rt+2+γ3Vπ(St+3)∣St=s]⋯≤Eπ′[Rt+γRt+1+γ2Rt+2+γ3Rt+3+⋯∣St=s]=Vπ′(s)
- 需要注意的是,Eπ′[Rt+γVπ(St+1)∣St=s] 这一步求期望的下标 π′ 这个策略只影响一步的采样,即 t 时刻的动作 at 的采样,后续执行的策略仍然是 π
∀s∈S,Qπ(s,π′(s))≥Vπ(s)⇒∀s∈S,Vπ′(s)≥Vπ(s)
在一个点上可以更新策略那么对于整个策略空间都可以去更新,那么更新策略就需要做两件事:
- 估计每个 value function
- 基于 value function 寻找到了策略提升点
则就可以更新我们的策略

举例:ϵ-greedy 的策略提升
ϵ-greedy 策略描述为:
π(a∣s)={ϵ/m+1−ϵϵ/mif a∗=argmaxa∈AQ(s,a)otherwise
如果另一个 ϵ-Greedy 策略 π′是基于 Qπ 的提升,那么有 $ V^{\pi’}(s) \geq V^\pi(s) $:
Vπ′(s)≥Qπ(s,π′(s))=m actions=≥=a∈A∑π′(a∣s)Qπ(s,a)mϵa∈A∑Qπ(s,a)+(1−ϵ)a∈AmaxQπ(s,a)mϵa∈A∑Qπ(s,a)+(1−ϵ)a∈A∑1−ϵπ(a∣s)−ϵ/mQπ(s,a)a∈A∑π(a∣s)Qπ(s,a)=Vπ(s)
这里有一个构造性的证明,实际上这个证明就是前面的策略提升定理中的证明特殊化为 ϵ-greedy 策略了
这里容易产生一个问题,ϵ-greedy 策略根本没变啊,为什么说它是策略提升了,实际上策略是依赖于值函数的,这里策略的提升含义是值函数进行优化了,间接导致在 state s 下的策略优化了
MDP 的优化:策略迭代与价值迭代
策略迭代
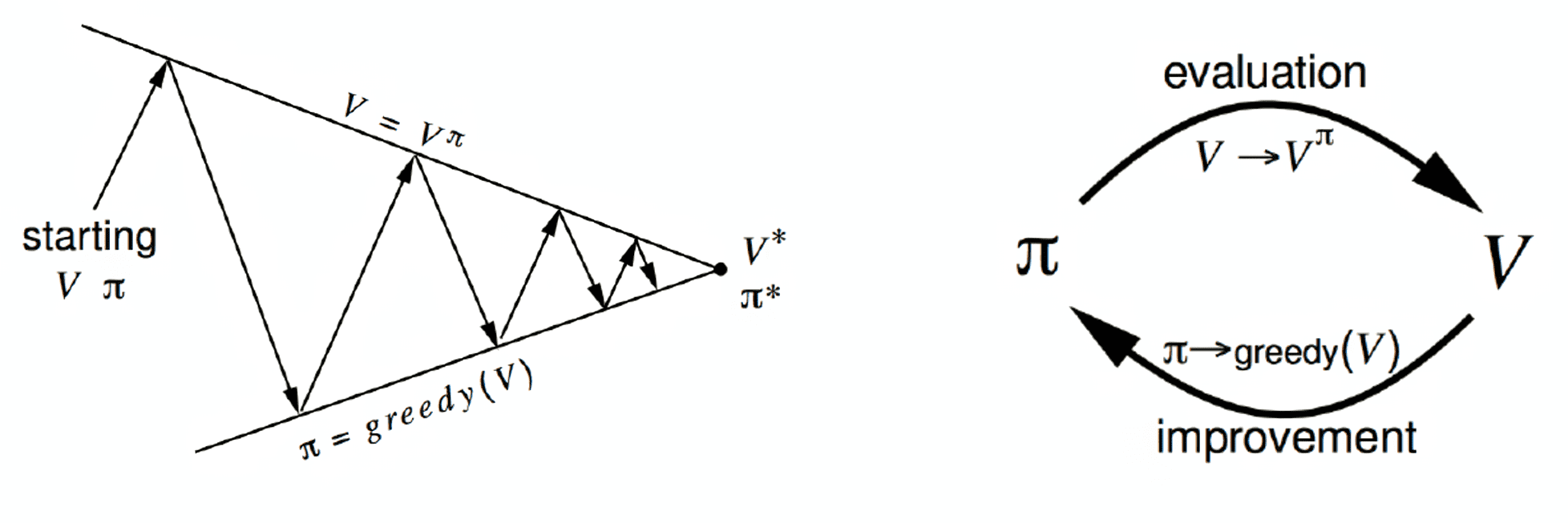
策略迭代(Policy Iteration)包含两个交替的步骤:
- 策略评估(Policy Evaluation):在给定一个策略的情况下,通过迭代计算该策略的价值函数(即每个状态的长期期望回报)。
- 策略改进(Policy Improvement):基于当前策略的价值函数,通过选取每个状态下能最大化价值的动作来生成新的策略。
策略迭代需要显式地维护一个策略,并通过评估和改进交替进行,直到策略收敛到最优策略
策略迭代过程(基于价值 V 函数):
- 随机初始化策略 π
- 循环直到收敛:
- 计算 V:=Vπ(策略评估)
- 对于每个状态,更新策略:π′(s)=argmaxa[r(s,a)+γ∑s′P(s′)V(s′)](策略改进)
在上面的算法中 V 的更新是相当耗时的,因此策略迭代算法显著慢于价值迭代算法。同时,策略改进的理论基础就是策略提升定理,保证了这样更新策略是在优化策略
值得一提的是,这样 greedy 的更新策略在实际中存在问题,在 MDP 的理论推导中所有的状态都能兼顾到,但是在实际中因为强化学习中数据十分有限,对于无模型(model free)的强化学习方法,兼顾探索于利用是非常重要的,就不使用 greedy 了
价值迭代
在策略迭代中可以观察到,虽然策略评估函数 Vπ 没有收敛到最优值,但是策略已经改进到了最佳的策略。再加上策略评估的计算量尤其大,因此可以考虑能否将策略评估去掉
价值迭代(Value Iteration)将这两个步骤合并到了一起。它直接通过贪心算法尝试找到每个状态下的最优行动,从而更新每个状态的价值函数(让价值函数快速收敛)。在每次迭代中:
价值迭代过程(基于价值 V 函数):
-
对于每个状态,初始化 Vπ(s)=0
-
循环直到收敛:
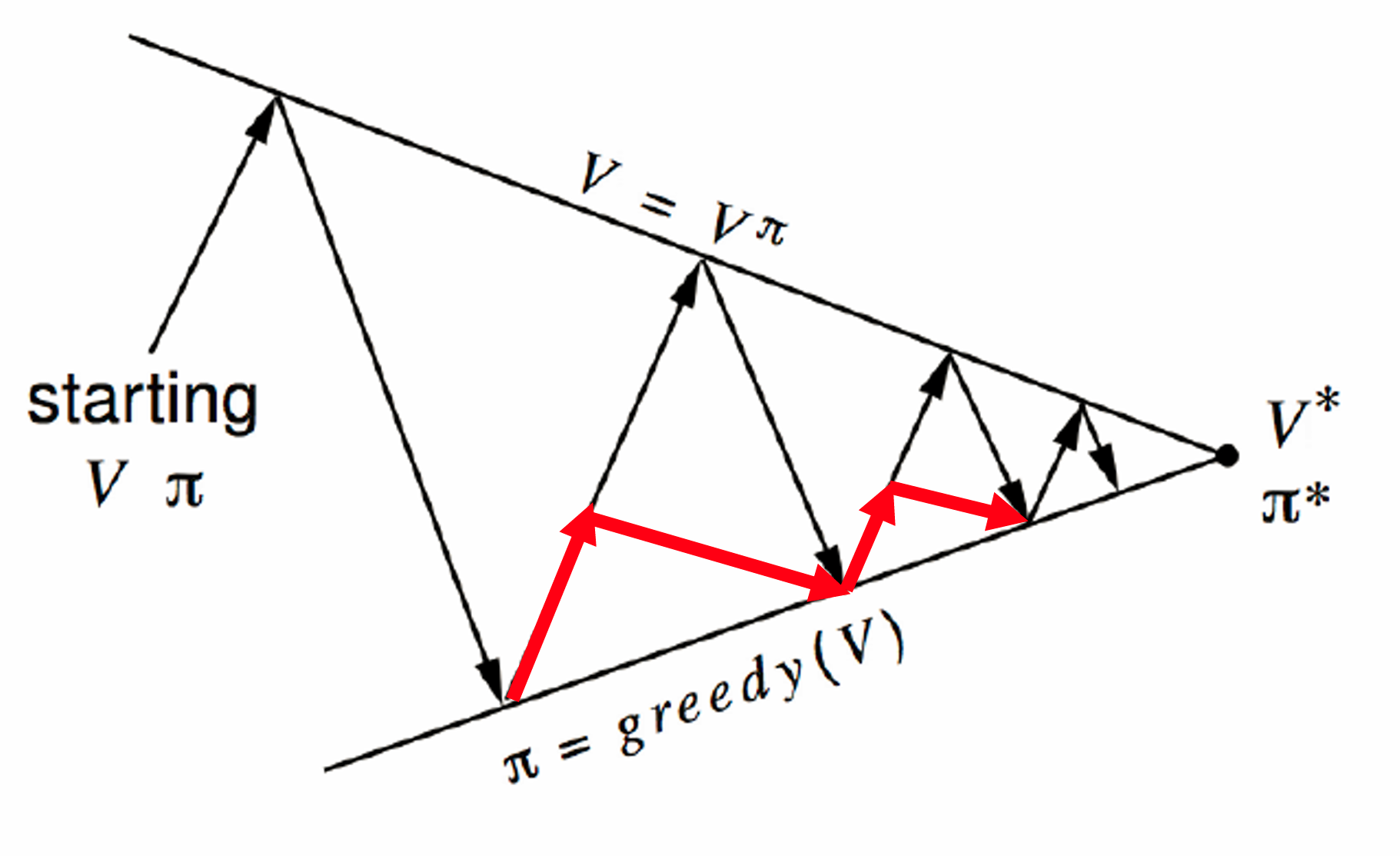
对于每个状态,更新价值:V(s)=r(s)+argmaxaγ[∑s′P(s′)V(s′)](策略改进)
值得一提的是,V(s) 没有策略 π 的角标,因为这里的 Vπ(s) 并不对应任何策略的值函数,他只是一个计算中间量(这里没有一个显示的策略),它的迭代过程可以用下图表述:
因此价值迭代方法是一个更实际的方法,有如下一半的规律:
- 价值迭代是贪心更新法,相当于策略评估中进行一轮价值更新,然后直接根据更新后的价值进行
策略提升
- 策略迭代中,用 Bellman 等式更新价值函数代价很大
- 对于空间较小的MDP,策略选代通常很快收敛
- 对于空间较大的MDP,价值迭代更实用(效率更高)
- 如果没有状态转移循环,最好使用价值迭代