3D Gaussian Splatting
3D Gaussian Splatting
图形学前置知识
点云数据:
三维坐标系统中的一组向量集合,每一个点包含三维坐标,可能包含颜色信息(RGB)或反射强度信息(Intensity,表示每个点云中点的反射、反射率、反射强度)。 本质上是3D空间中无序、无结构的海量数据点的集合。它的获取方式多种多样,在 3D Gaussian Splatting 中主要会通过二维影像进行三维重建,在重建过程中获取点云数据
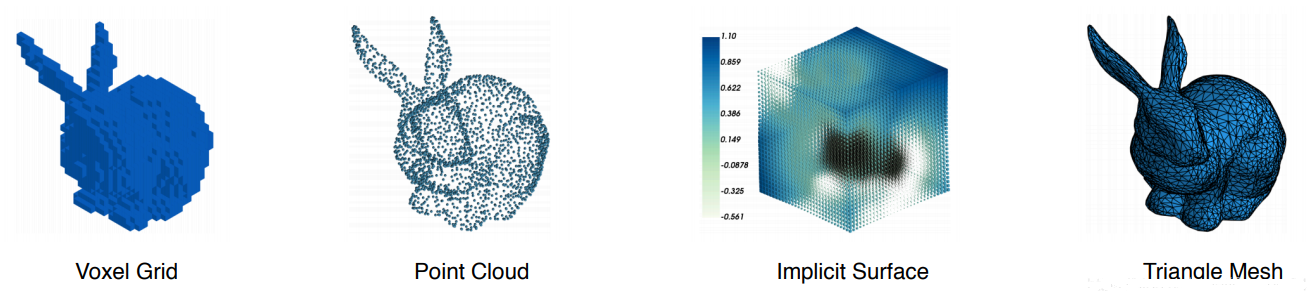
3D 表面形状表示:
- 多边形网格表示(Polygon Mesh Representation):由连接顶点的边和面组成的结构。它是表示复杂几何形状的一种常见方法。多边形网格通常由三角形或四边形构成,但也可以包含更高阶的多边形。多边形网格可以表示平面几何形状,也可以通过三角剖分等技术表示曲面或复杂形状(不光滑)
- 参数曲面表示(Parametric Surface Representation):通过参数化方程来表示的曲面。它使用参数化坐标(通常是二维参数)来描述曲面上的点。参数曲面可以通过数学函数或参数化曲线来生成,例如贝塞尔曲线和贝塞尔曲面。参数曲面表示适用于光滑的曲面和复杂的形状(光滑)
- 体素表示(Voxel Representation):三维空间中的一个像素或体素元素,类似于二维图像中的像素。体素表示将三维空间划分为规则的体素网格(小立方体),并使用每个体素的属性(如密度、颜色)来表示物体的形状和属性。体素表示适用于体积数据和体绘制应用,例如医学图像和体渲染
渲染(重建任务的逆任务):
将三维场景转换为二维图像的过程。它是计算机图形学领域的一个重要任务,基于已知的3D模型、材质属性、光照条件等信息,使用确定性的算法计算出2D图像。这个过程中,输入(3D场景)是明确的,输出(2D图像)是通过模拟物理光学现象计算得出的,渲染技术主要有提渲染和光栅化:
光栅化(Rasterization):
光栅化是一种将3D几何对象(通常是多边形网格和参数曲面)转换为2D图像的过程。它首先确定哪些像素被几何形状覆盖,然后计算这些像素的颜色值。找到所有被几何原型所占据的所有像素点然后逐个渲染这些点,得到图像的显示效果。光栅化渲染速度快,用于实时渲染,但渲染效果可能不如体渲染
体渲染 (Volume Rendering):
体渲染用于直接从体积数据(如CT或MRI扫描得到的数据集)生成图像,而不需要先将数据转化为表面模型。它可以显示物体内部的细节。能够展示物体内部结构,非常适合医学成像、气象学等领域
- 光栅化技术是 Gaussian Splatting 算法采用的技术,Nerf 采用的是体渲染技术
3D Gaussian Splatting 是2023 年提出的技术,他是属于图形学和 CV 的内容,简而言之,Gaussian Splatting提出了一种三维重建(3D Gaussian)和配套的渲染方式(Splatting),能够
- 迅速地重建现实世界中的场景
- 用重建的场景渲染新视角图片,可以做到实时渲染且效果很好
3D Gaussian Splatting
3D Gaussian Splatting 渲染的过程可以用下图表示:
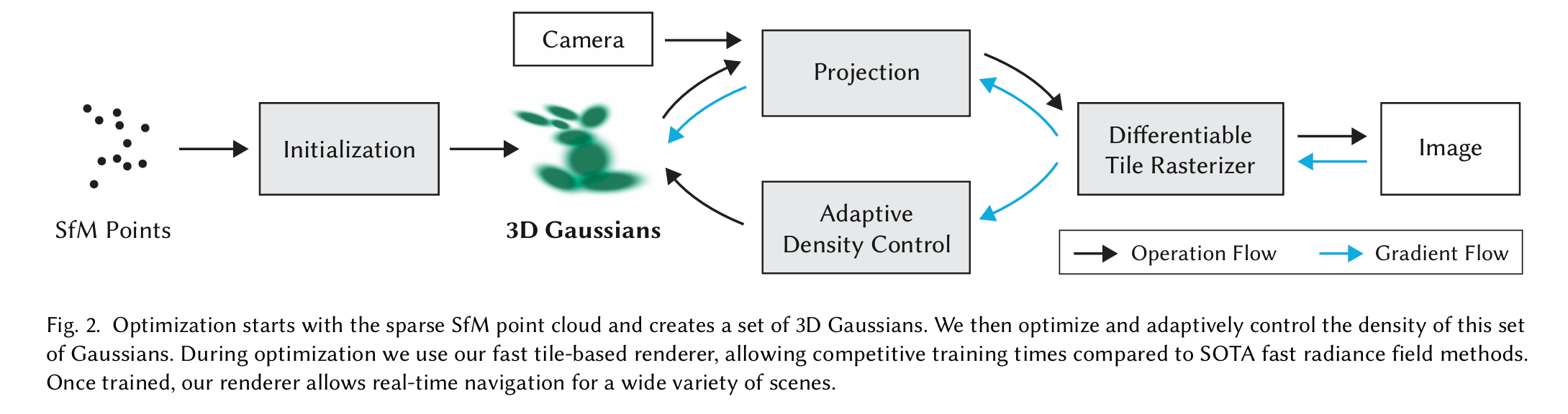
- 先用一组图片(多视角图片)来获得一组点云(SFM 算法,不是重点不讲解)
- 再使用这一组点云初始化一组 3D Gaussians 椭球
- 将 3D Gaussians 椭球投影到相机坐标(世界坐标投影到相机坐标)
- 使用光栅化渲染技术渲染出图像
- 对比渲染的图像和原图的区别,将 loss 返回到 3D Gaussians 来进行优化(类似反向传播)
我们重点介绍投影,渲染和优化部分的算法
Gaussians and initialization
在这里指出高斯椭球和多元正态分布天生的内在联系,多元正态分布的概率密度表达式如下:
令 , ,则可以推出 在空间内描述的就是一个椭球
为了初始化高斯椭球,为了保证渲染效果,直觉上我们需要初始化椭球的几个参数是:
- 位置(对应多元正态分布的均值)
- 旋转信息与长度信息(对应多元正态分布的协方差矩阵)
- 颜色(选择球谐函数为基函数,用球谐函数参数和基函数的系数来描述,)
- 不透明度信息(opacity)
Projection
这个投影是将世界坐标系投影到 2D 平面坐标,这个过程可以被看作是两步投影:从世界坐标系到相机坐标系的变换 + 从相机坐标系到2D图像平面的投影
世界坐标系到相机坐标系的变换
这一步骤也称为“外参变换”,它涉及到将三维空间中的点从世界坐标系转换到相机坐标系。这个变换可以通过一个包含旋转和平移信息的 变换矩阵 来完成,该矩阵描述了相机相对于世界坐标系的位置和方向:
其中:
- 是世界坐标系中的点(注意是坐标四维的,除了三维坐标还加上了一个齐次项维度 1)
- 是转换后的相机坐标系中的点
- 包括了一个旋转矩阵 (一个正交阵) 和一个平移向量 ,可以写为:
推导过程:
从相机坐标系到2D图像平面的投影
这一步骤其实分为两步,第一步是相机坐标系到图像坐标的投影(投影是线性变化),第二部是图像坐标向像素坐标的变换(这一步是非线性变换),在这里我们不学习成像的原理,把它们合成一步变换来描述,这个变换将相机坐标系中的 3D 点投影到像素 2D 图像平面上。这个过程使用相机的内部参数,如焦距、主点位置等,这些参数通常被组织成一个 的相机内参矩阵 ,这个投影过程可以表示为:
- 一个很自然的问题是:为什么 矩阵的形状是 ,原因在于在这个变换中,有一个步骤是 3D 到 2D 的转化时对第三个坐标归一化了,因此转化坐标的之后有一个元素是个常数项没有含义,因此变换后坐标还是二维,并不存在问题
坐标变换对 Gaussian 椭球的影响:
使用上面的变换,将高斯椭球投影到 2D 图像平面上,描述这个高斯椭球方程为:
代入
形状的协方差矩阵 的变化表示为:
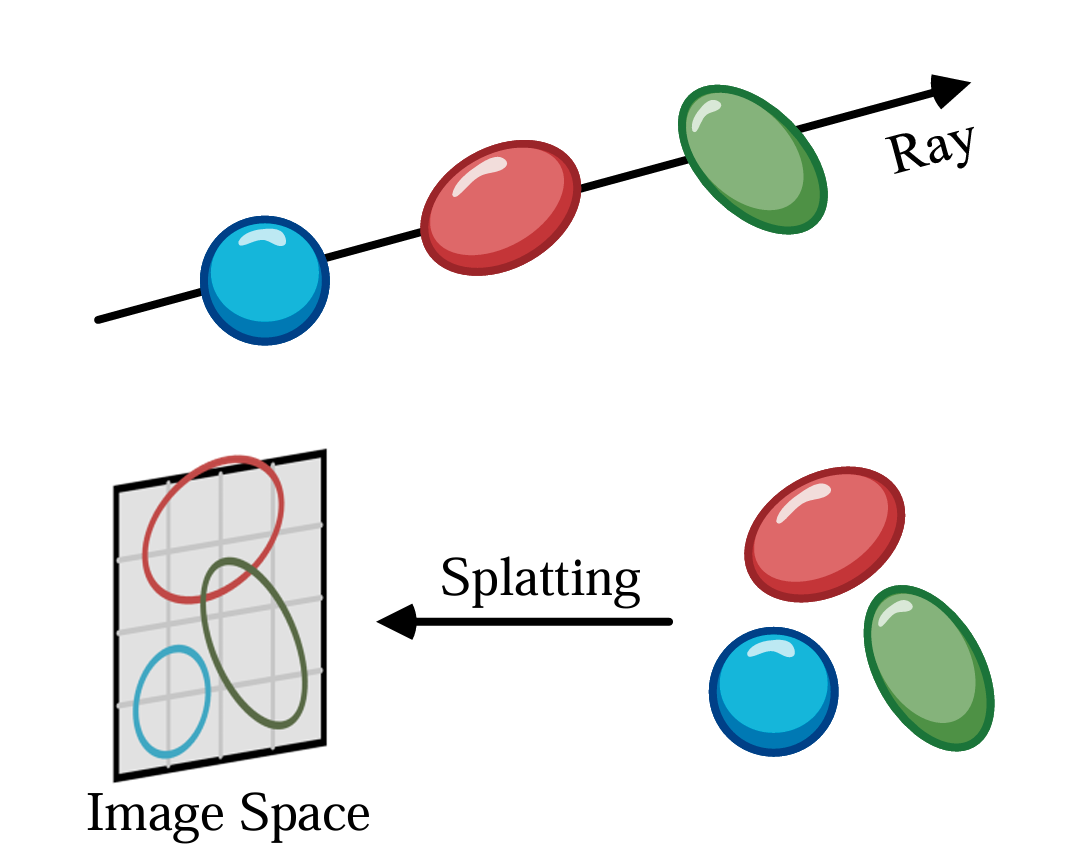
3D Gaussian Splatting 快速渲染:
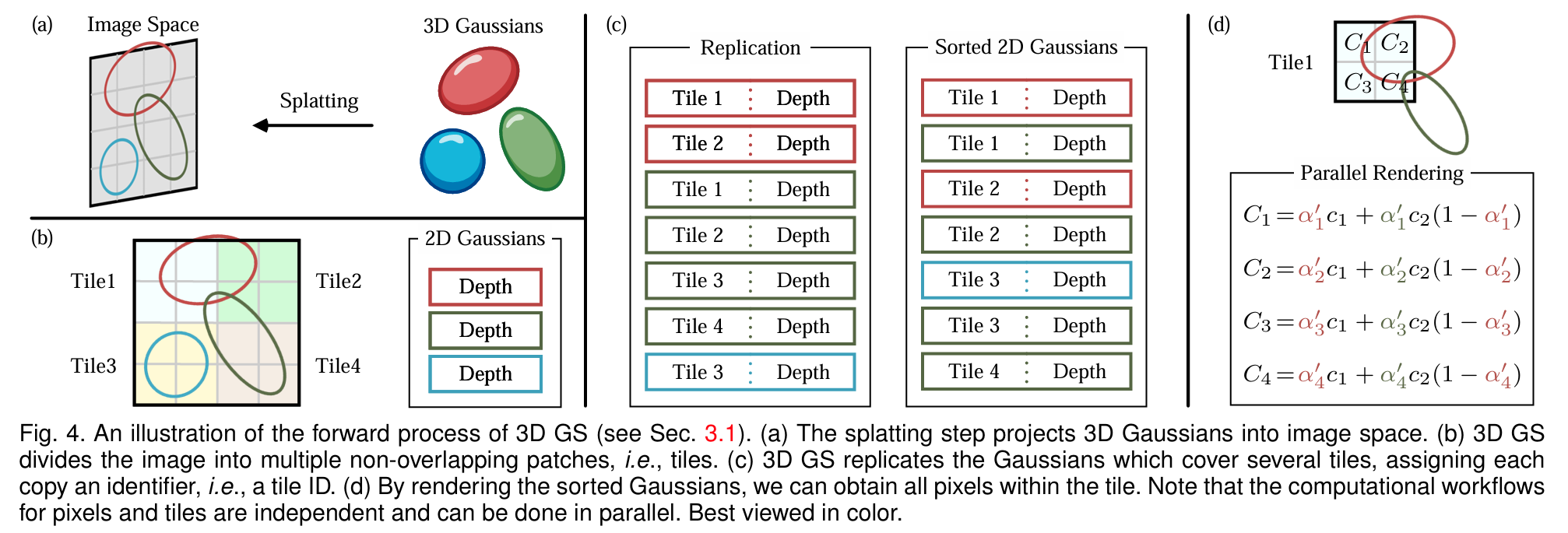
- 将三维椭球 splate 到二维的视图平面(只保留视锥以内的椭球)
- 将视图平面划分为一定数量的栅格,同时开一片存储区将椭球到视图平面的深度值记录下来
- 给存储区的椭球开一个副本,不仅记录每个椭球对应的深度值,还要记录每个椭球 splate 到了哪些栅格里面(上图中的©图,一种颜色代表对应一个椭球)
- 将这个副本区的椭球记录按照栅格的序号和高斯椭球的深度排序(重要性:栅格序号 > 高斯椭球深度)
- 使用像素渲染,将每个像素上的颜色用栅格内的,覆盖该像素位置的高斯椭球的不透明度和颜色来渲染
看到这里可能会好奇,栅格的划分有什么作用,最终我们渲染的操作还是要对像素级别进行的,那为什么不直接划分像素进行渲染而是先划分栅格再划分像素呢?答案是节省计算成本,直接对像素进行排序是非常耗时且耗存储区的,我们使用了栅格先做一个大概的划分,提前做一个快速深度排序,减少时间成本。伪代码示意如下:
自适应点云分布方式:
- Pruning(减少 Gaussians):
- 减少伪影出现,将不透明度大于一定阈值的高斯椭球(黑色的高斯椭球)给剔除掉,能够去除渲染图像中的黑影
- 处理欠采样问题,将不透明度小于一定阈值的高斯椭球(太透明了可以忽略)给剔除掉,能够减少高斯椭球的数量
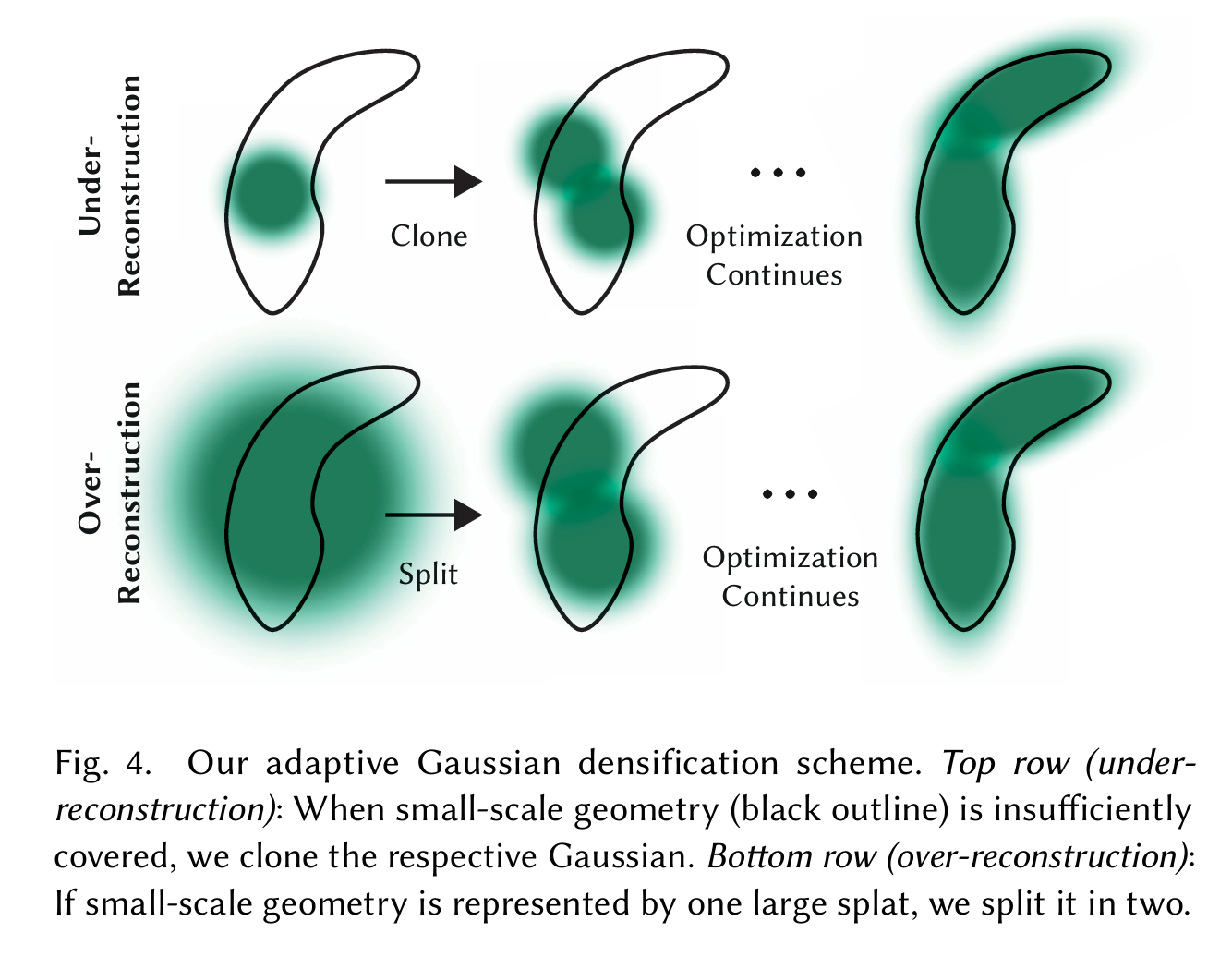
- Desification(增加 Gaussians):为了达到渲染质量高的目的,不能仅仅改变高斯椭球的参数,有时还需要增加高斯椭球的数量,这时候分为两个情况(使用空间位置梯度判定),under-reconstruction 和 over-reconstruction:
- under-reconstruction:对于重建不足的区域将 Gaussian 给复制一份
- over-reconstruction:对于过重建的区域将 Gaussian 给分裂开
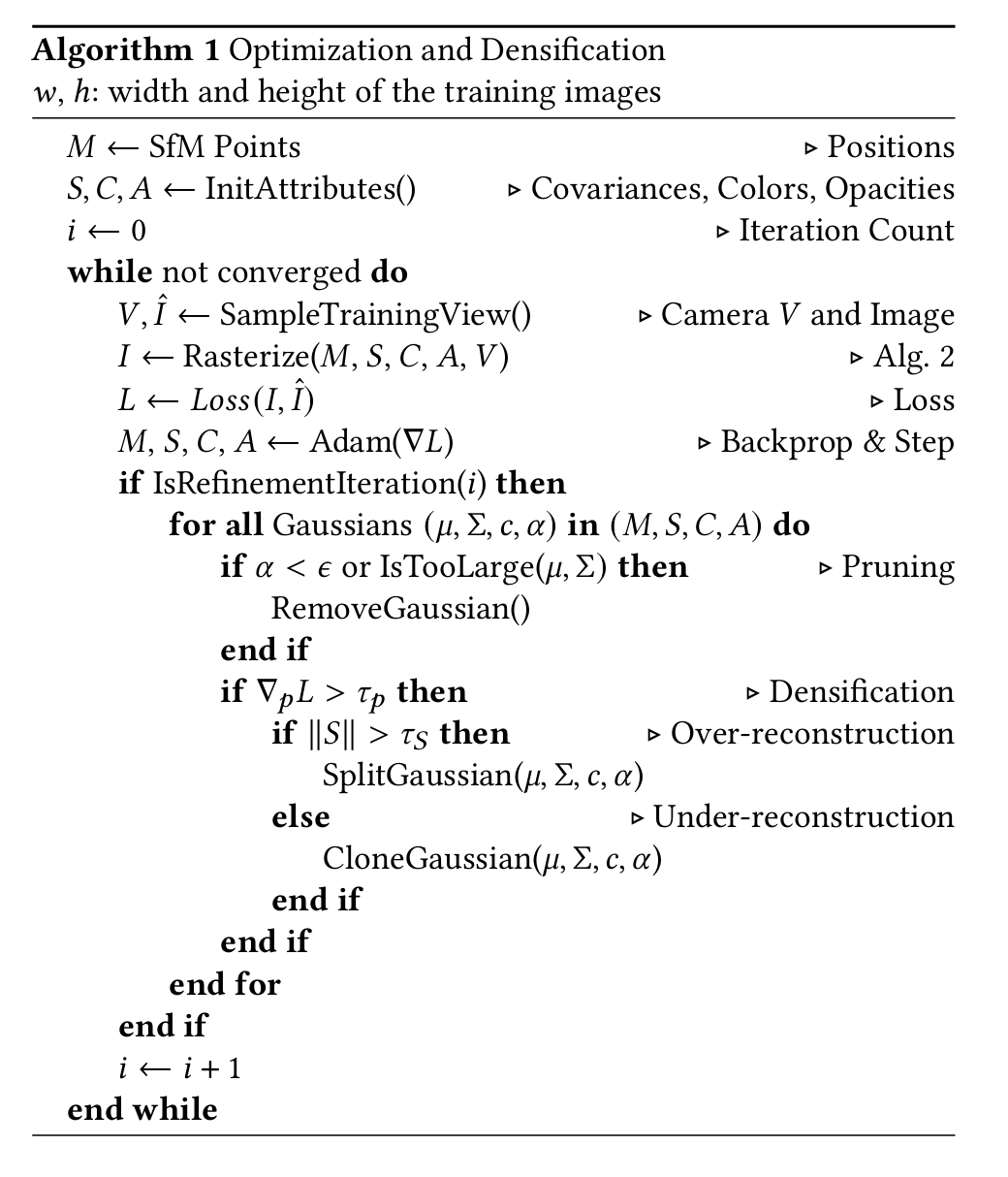
算法的伪代码描述如下: