model free reinforcement learning
Model-Free强化学习(MFRL)的核心在于不依赖环境动态模型的策略学习方法,最优策略的选择为 π(s)=argmaxa∈A∑s′Psa(s′)V(s′),但是既然不对环境建模,就无法知道状态转移概率 Psa(s),因此只能基于 Qπ 来进行动作的选择,通过直接估计动作值函数Q(s,a)来指导决策,使得算法在复杂环境中具有更强的适应性:
π(s)=arga∈AmaxQ(s,a)
因此,动作值函数的更新,估计就代表着策略的更新,下面举两种 model free 的算法:
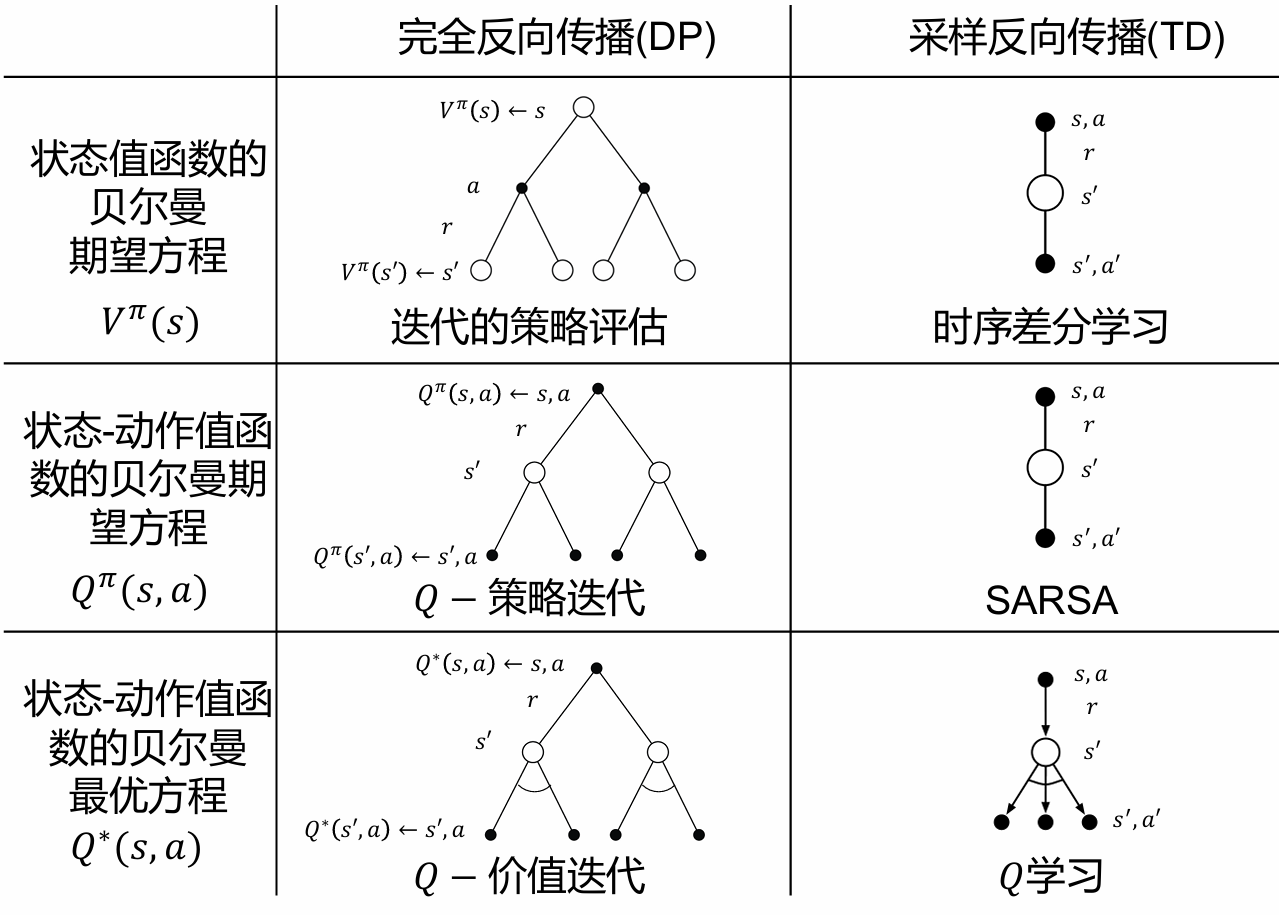
On-policy: SARSA
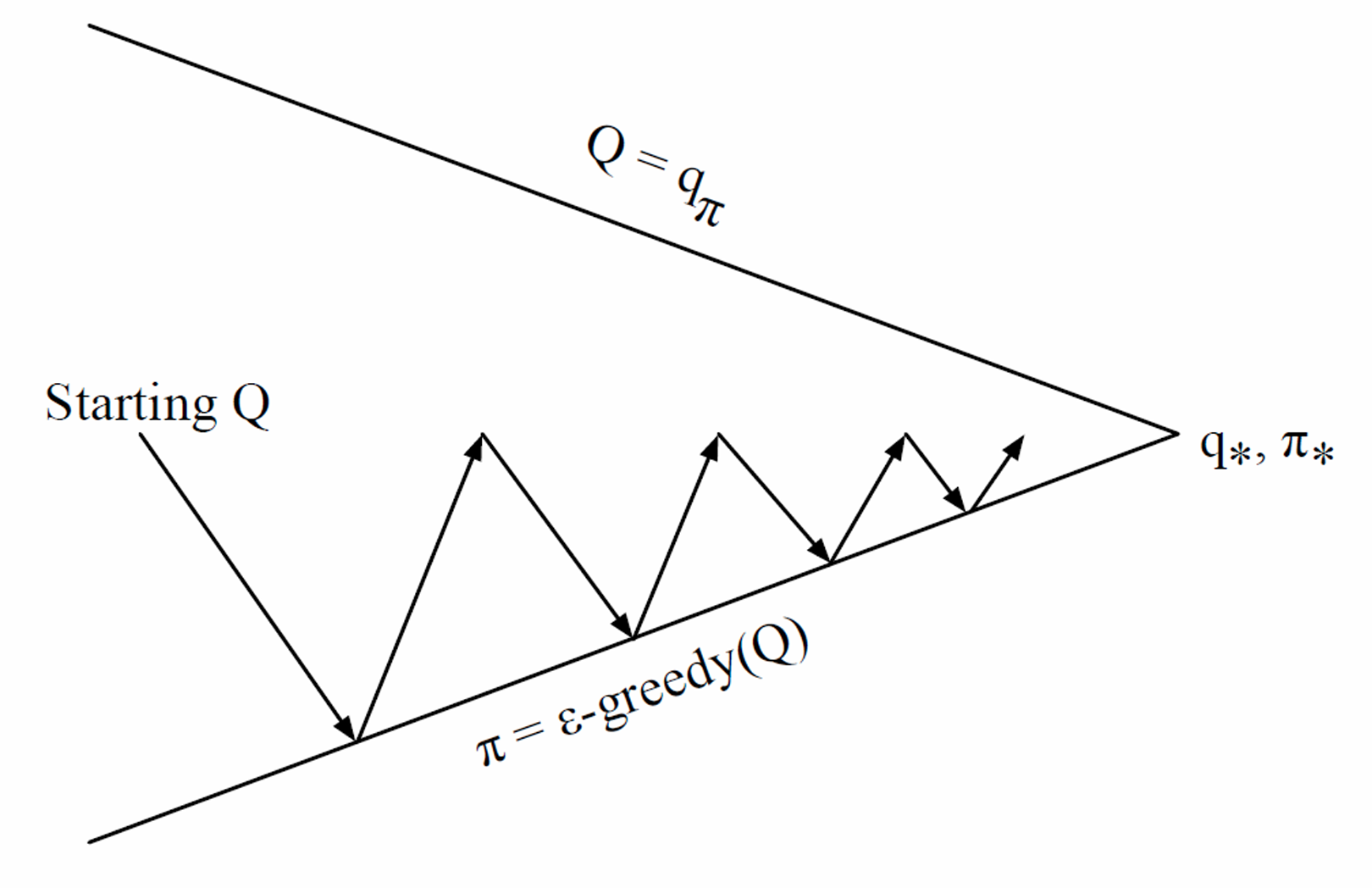
On-policy 算法是指使用行为策略(生成数据的策略)与目标策略(优化的策略)完全相同的算法,SARSA 是一种 on-policy 的算法,策略评估和策略改进时采用的策略不同:
- 策略评估:使用 TD(0) 算法更新 Q(s,a):Q(s,a)←Q(s,a)+α(r+γQ(s′,a′)−Q(s,a))
- 策略改进:ϵ-greedy 算法进行策略改进
和前面价值迭代的方式相同,策略评估的方式中,其实包含着策略和 Q 的耦合更新,每一步更新得到的 Q 并没有一个策略 π 对应,而是作为一个中间值加速收敛
Off-policy: DQN
on-policy 的数据问题:on-policy 缺乏训练的数据,每次策略改变之后再之前的数据全部被丢弃,导致数据量不够的问题,往往需要从原先数据内进行重要性采样(variance 很大),为了解决这个问题便有了 Q-learning
什么是 off-policy:off-policy 指的是在数据采集和策略更新所使用的策略不是同一个策略,具体来说分为策略 π 和策略 μ:
- 目标策略 π(a∣s):进行价值评估(exploitation)(Vπ(s) 或 Qπ(s,a))
- 行为策略 μ(a∣s):负责数据采集(exploration)收集数据:{s1,a1,r1,s2,a2,r2,...,sT}∼μ
off-policy 的好处在于:
- 平衡探索 (exploration) 和利用 (exploitation)
- 重用旧策略所产生的经验(增加训练数据)
off-policy 算法极大拓宽了强化学习的范围,使用过去积累的数据训练策略,避免高风险场景的频繁试错
Q-learning 中,由 Q 函数的定义:
Q(st,at)==t=0∑Tγtr(st,at),at∼μ(st)r(st,at)+γQ(st+1,at+1)
使用 TD(0) 方式进行更新:
Qπ(st,at)=Qπ(st,at)+α(r(st,at)+γQπ(st+1,at+1)−Qπ(st,at))
为什么这样更新不需要重要性采样?原因在于策略 μ 只影响当前 st 状态下采用 at 动作,后续的 Qπ 值仍然是有策略 π 来决定的(历史信息),因此不需要使用重要性采样
我们让目标策略 π 为最优策略,则 Q-learning 的更新方式变为:
Qπ(st,at)←==Qπ(st,at)+α(r(st,at)+γQπ(st+1,at+1)−Qπ(st,at))Qπ(st,at)+α(r(st,at)+γQπ(st+1,argat+1′maxQ(st+1,at+1′))−Qπ(st,at))Qπ(st,at)+α(r(st,at)+γargat+1′maxQπ(st+1,at+1′)−Qπ(st,at))
注意 off-policy 上面的理解只对于策略相差不大(采样策略和更新策略)的情况下,如果策略相差过大 Q-learning 的算法是十分低效的
重要性采样的规避机制
Off-Policy 方法通过价值函数的策略一致性规避了传统重要性采样的需求:
Qπ(st,at)=Eμ[r+γQπ(st+1,at+1)∣st,at]
关键在于目标策略 π 主导后续状态-动作对的选择,使得期望计算不依赖行为策略 μ 的采样分布。这种特性使得 Q-learning 在策略差异较小时效率显著提升,但在策略差异过大时可能面临收敛性挑战
应用场景对比分析
| 特性 |
On-Policy |
Off-Policy |
| 数据效率 |
低(需持续交互) |
高(可复用数据) |
| 探索安全性 |
风险较高 |
可控(分离策略) |
| 算法复杂度 |
较低 |
较高 |
| 典型应用 |
在线实时控制 |
推荐系统、医疗决策 |
Off-policy & Importance Sampling
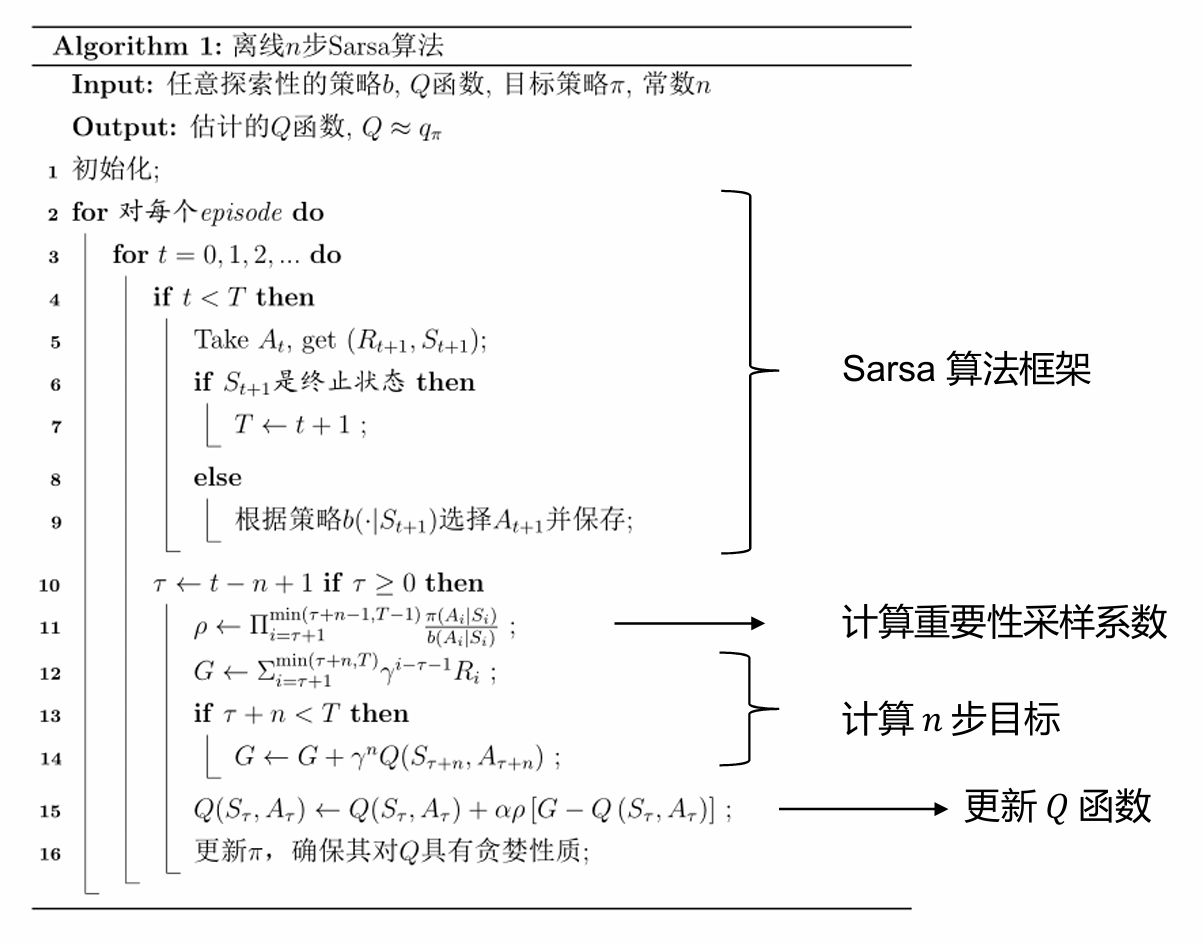
前面我们说过,任何 on-policy 算法都可以使用 off-policy 方式进行学习,SARSA 也不例外,我们可以将多步 SARSA 使用 off-policy 方式进行学习,同时引入重要性采样(需要重要性采样的原因在于多步 SARSA + off-policy):