欧拉公式在n维的推广
我们知道 ez=er(cosθ+sinθ) 为最熟悉的欧拉公式形式,而复数的表示可以用二元的矩阵取代,因此我们可以将复数形式的欧拉公式改写为矩阵形式,因此很自然的一个想法是,这个公式是否能推广到 n 维欧式空间
欧拉公式的意义
以一个线性微分方程组为例:
⎩⎪⎪⎪⎨⎪⎪⎪⎧dtdx1(t)=a11x1(t)+a12x2(t)+⋯+a1nxn(t)dtdx2(t)=a21x1(t)+a22x2(t)+⋯+a2nxn(t)⋯dtdxn(t)=an1x1(t)+an2x2(t)+⋯+annxn(t)
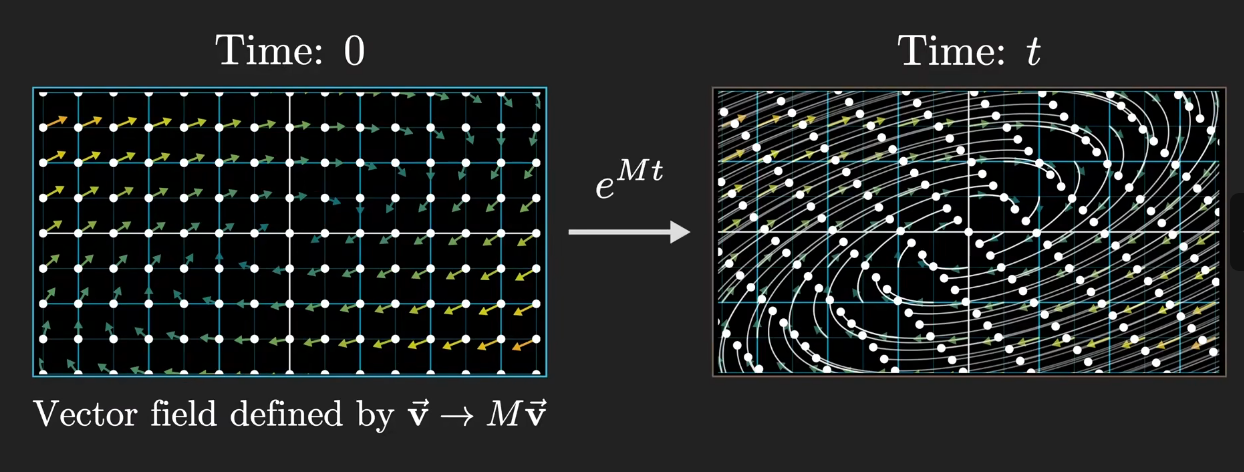
可以把它等价地写为 dtdx(t)=Ax(t),它的解就像普通微分方程一样:x(t)=eAtx(0),它的几何意义是一个 n 维向量在空间内的运动情况,我们把 x 视为运动轨迹,则 A 则视为对空间内的位置到对应的速度的变换:
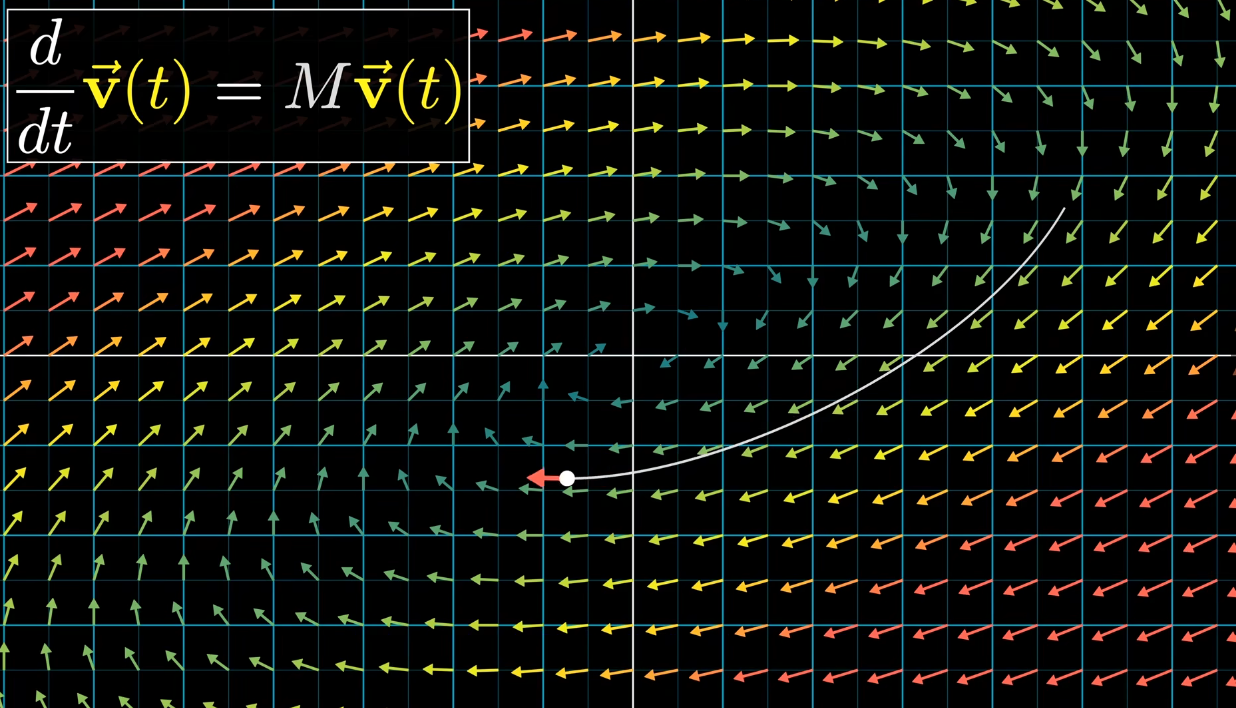
该方程的解 eAt 视为让一个初始值沿着这个场运动 t 时间(它仍然是一个矩阵,还是对空间的一个变换):
如果能写出沿某个平面的沿着某个东西旋转的速度场,那么我们是否能利用这个公式来拓展我们的欧拉公式,让他描绘出旋转的过程?
令 R=[0,−11, 0],则 R 代表在这个空间逆时针旋转 90° 的速度场,eRt 就是旋转矩阵:
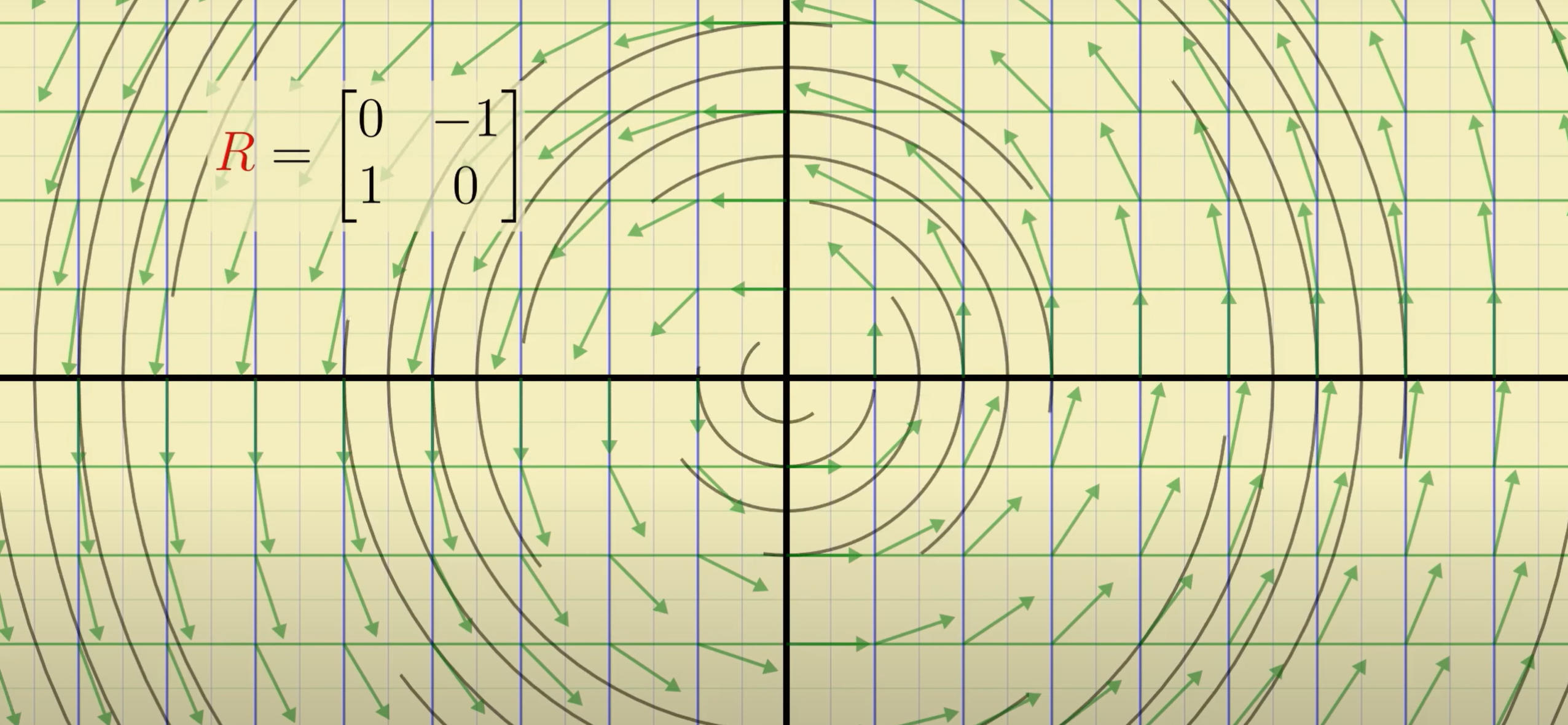
那么按理来说 eRt 具有周期性,我们用数学的方式论证一下:
由于 R 的特殊性:
R4=[01−10]4=[−100−1]2=I
我们可以按照矩阵指数函数的定义直接展开:
eRt=n=0∑∞n!Rntn=eRt=n=0∑∞n!Rntn=n≡0(mod4)∑n!1[tn00tn]+n≡1(mod4)∑n!1[0tn−tn0]+n≡2(mod4)∑n!1[−tn00−tn]+n≡3(mod4)∑n!1[0−tntn0]=[1−2t2+4!t4−⋯t−3!t3+5!t5−⋯−t+3!t3−5!t5+⋯1−2t2+4t4−⋯]=[costsint−sintcost]
这不就是线性代数里面熟悉的旋转矩阵吗(其实这也是二维的欧拉公式),有了这个理解,我们可以继续理解我们的高维欧拉公式
高维欧拉公式
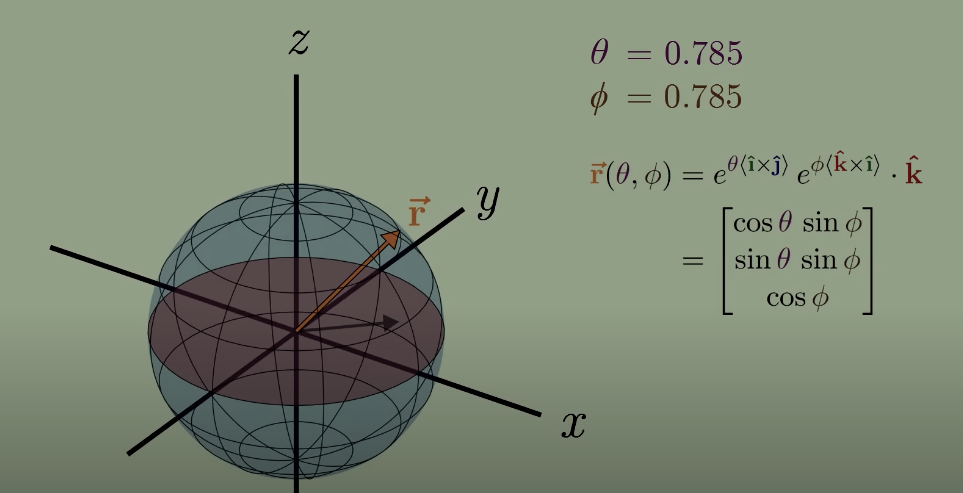
很遗憾的是,高维的欧拉公式只能规定在某一个平面里面旋转 n 维向量,由于复平面的特殊性,我们在复平面内往往意识不到这一点
我们以三维空间为例,设 u v 为相互正交的单位向量(这样可以先不考虑它的伸缩性),考虑 w=u×v r′=w×r(理解它的几何含义),这样就能把 r 在 u v 平面内顺时针旋转 π/2,我们发现三重叉积就是我们想要的旋转,下面我们用矩阵的语言描述它:
considering:a×b=⎣⎢⎡0az−ay−az0axay−ax0⎦⎥⎤ a=⎣⎢⎡axayaz⎦⎥⎤Then:(u×v)×b=⎣⎢⎡0uxvy−uyvxuxvz−uzvxuyvx−uxvy0uyvz−uzvyuzvx−uxvzuzvy−uyvz0⎦⎥⎤b
注意到:
⎣⎢⎡0uxvy−uyvxuxvz−uzvxuyvx−uxvy0uyvz−uzvyuzvx−uxvzuzvy−uyvz0⎦⎥⎤=⎣⎢⎡uxvxuxvyuxvzuyvxuxvyuyvzuzvxuzvyuzvz⎦⎥⎤−⎣⎢⎡uxvxuyvxuzvxuxvyuyvyuzvyuxvzuyvzuzvz⎦⎥⎤=⎣⎢⎡vxvyvz⎦⎥⎤[uxuyuz]−⎣⎢⎡uxuyuz⎦⎥⎤[vxvyvz]=vuT−uvT
其实到这一步我们可以发现这就是外积(outer product)或更一般的楔积(wedge product),这里不展开讲。我们把这一步运算记为:
F(u,v)=vuT−uvT
虽然上面的公式是用叉乘来导出的,而不是所有的 n 维欧式空间都可以定义叉乘,但是这个公式实际上是可以推广到任意 n 维空间的,只是在三维空间内它恰好可以被翻译为叉乘
欧拉公式:
eθF(u,v)r
代表着将 r 在 u v 平面内顺时针旋转 θπ/2 度(取弧度制)
eθF(u,v)=I+F(u,v)sinθ+F2(u,v)(1−cosθ)
可以自行对比一下二维复数情形,取 u,v 为 [1,0]T,[0,1]T:
F(u,v)=[01][10]−[10][01]=[0100]−[0010]=[01−10]
这其实就是前面举的例子!我们再继续把二维欧拉公式写下去:
eθF([10],[01])=I+[01−10]sinθ+[−100−1](1−cosθ)=[01−10](sinθ+cosθ)eiθ=cosθ+isinθ